Altium & KiCAD
150+ hours
Schematic capture, PCB layout, and DFM for analog, digital, mixed-signal, and power electronics designs in Altium and KiCAD.
Electrical Engineering Portfolio
Power Electronics, PCB Design and Layout, Schematic Capture, and Analog/Digital Circuit Design.
Altium & KiCAD
150+ hours
Schematic capture, PCB layout, and DFM for analog, digital, mixed-signal, and power electronics designs in Altium and KiCAD.
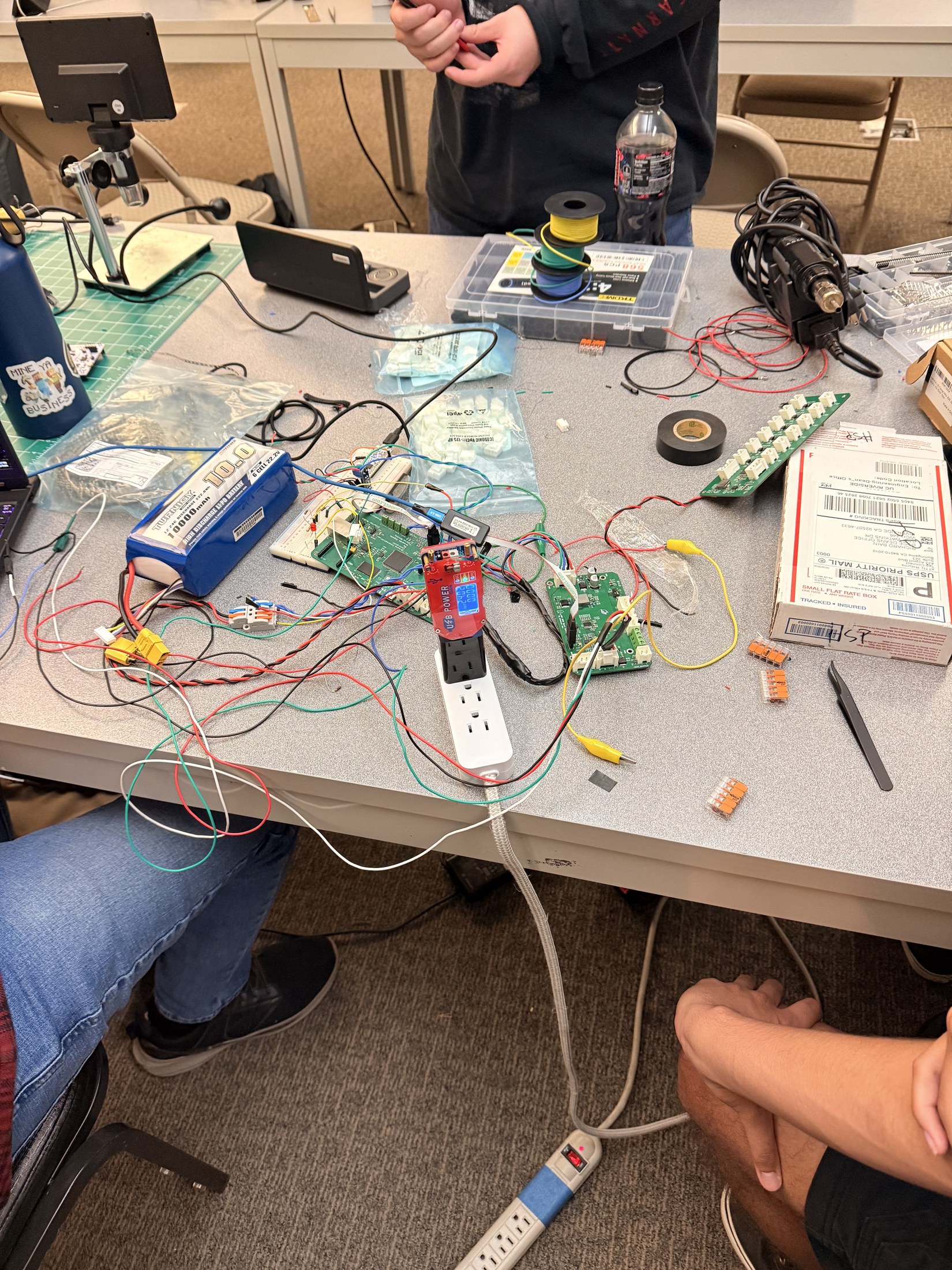
Hardware Validation
30+ hours
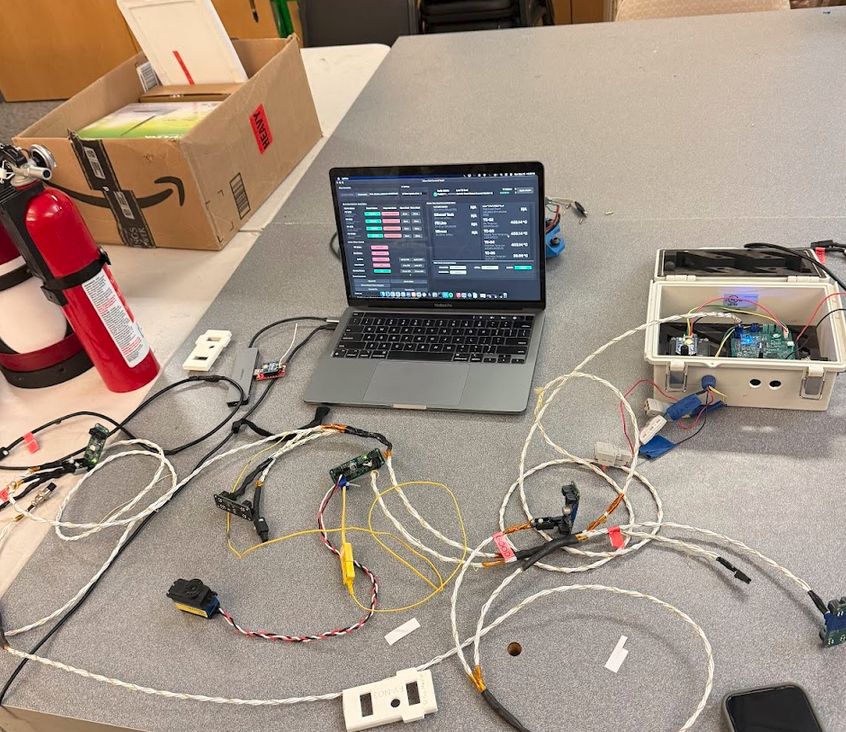
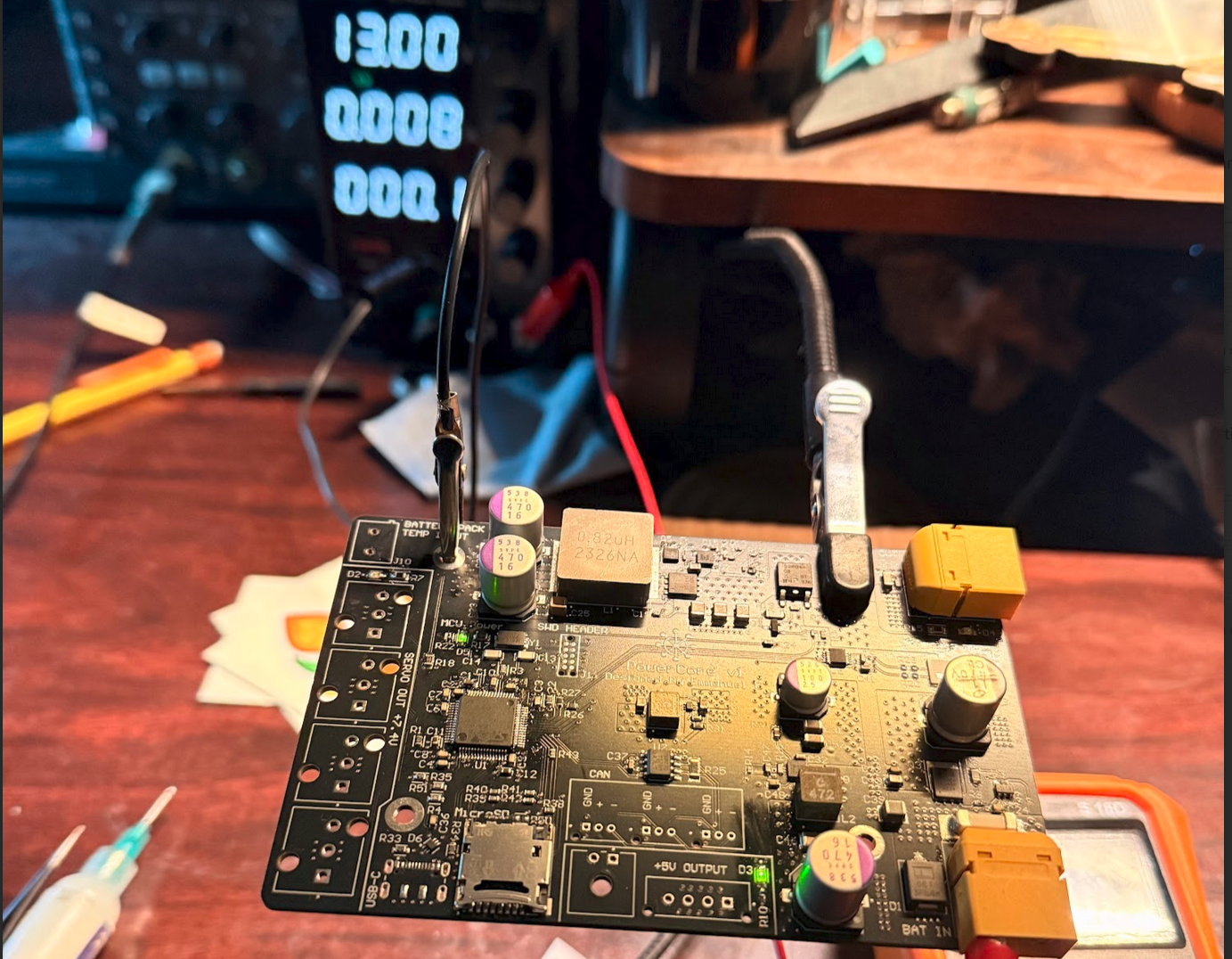
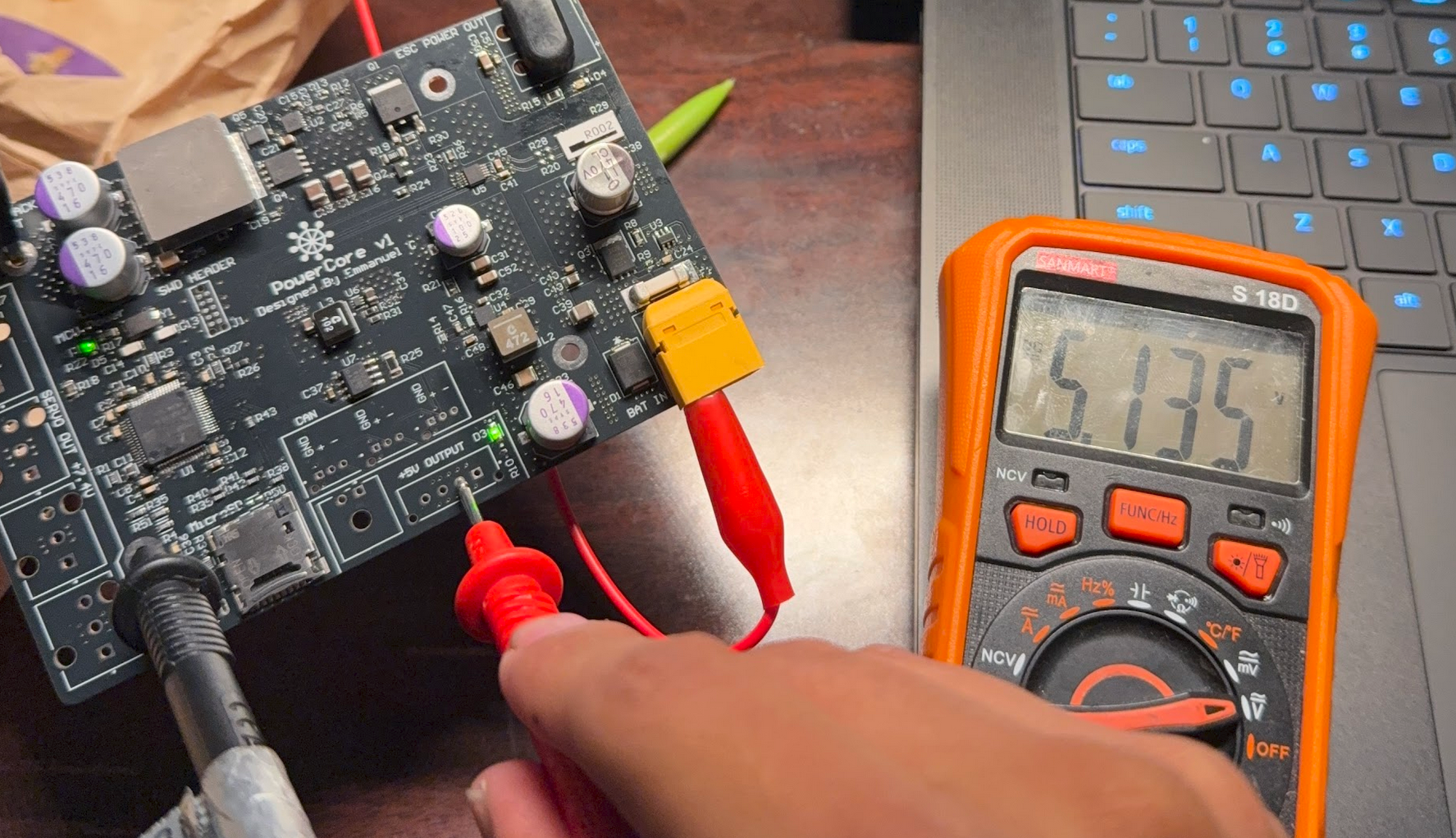
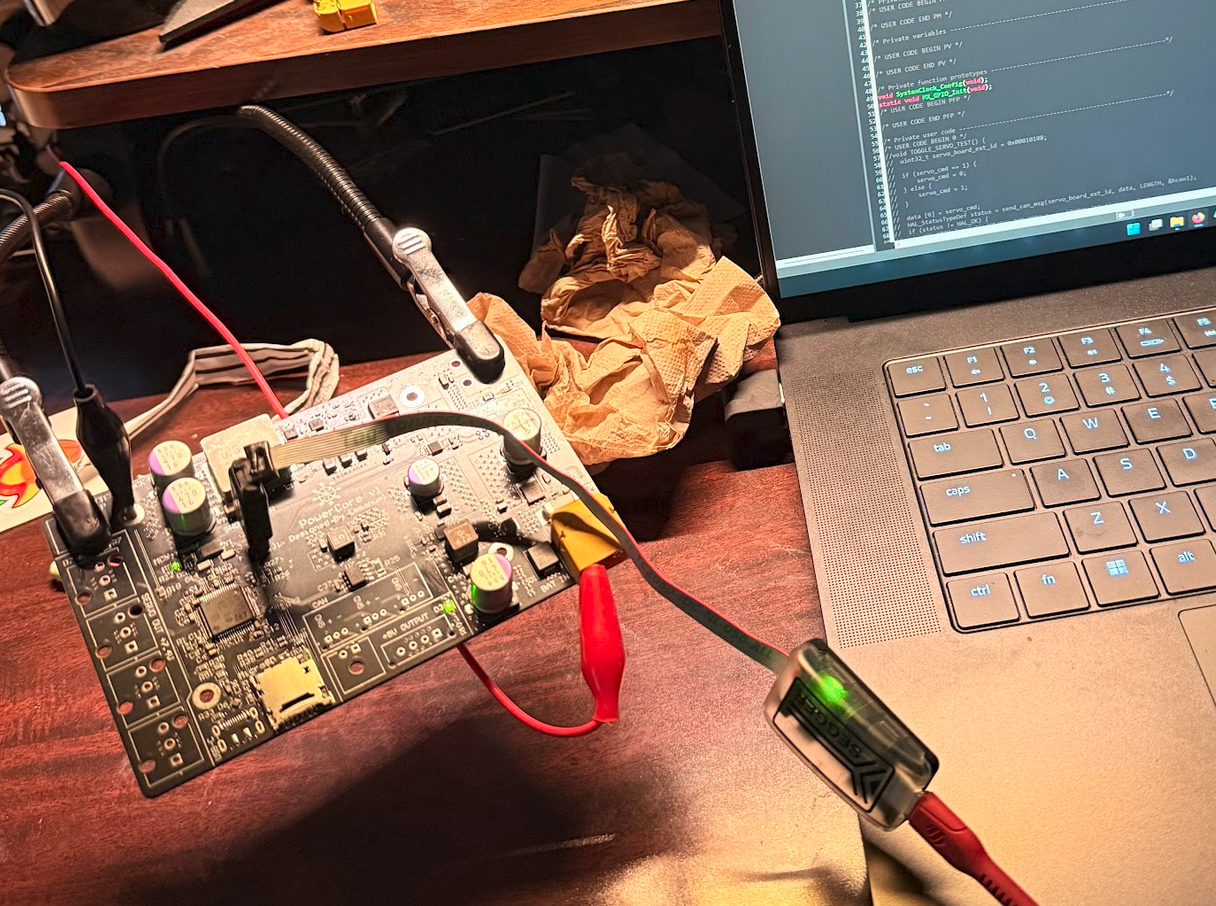
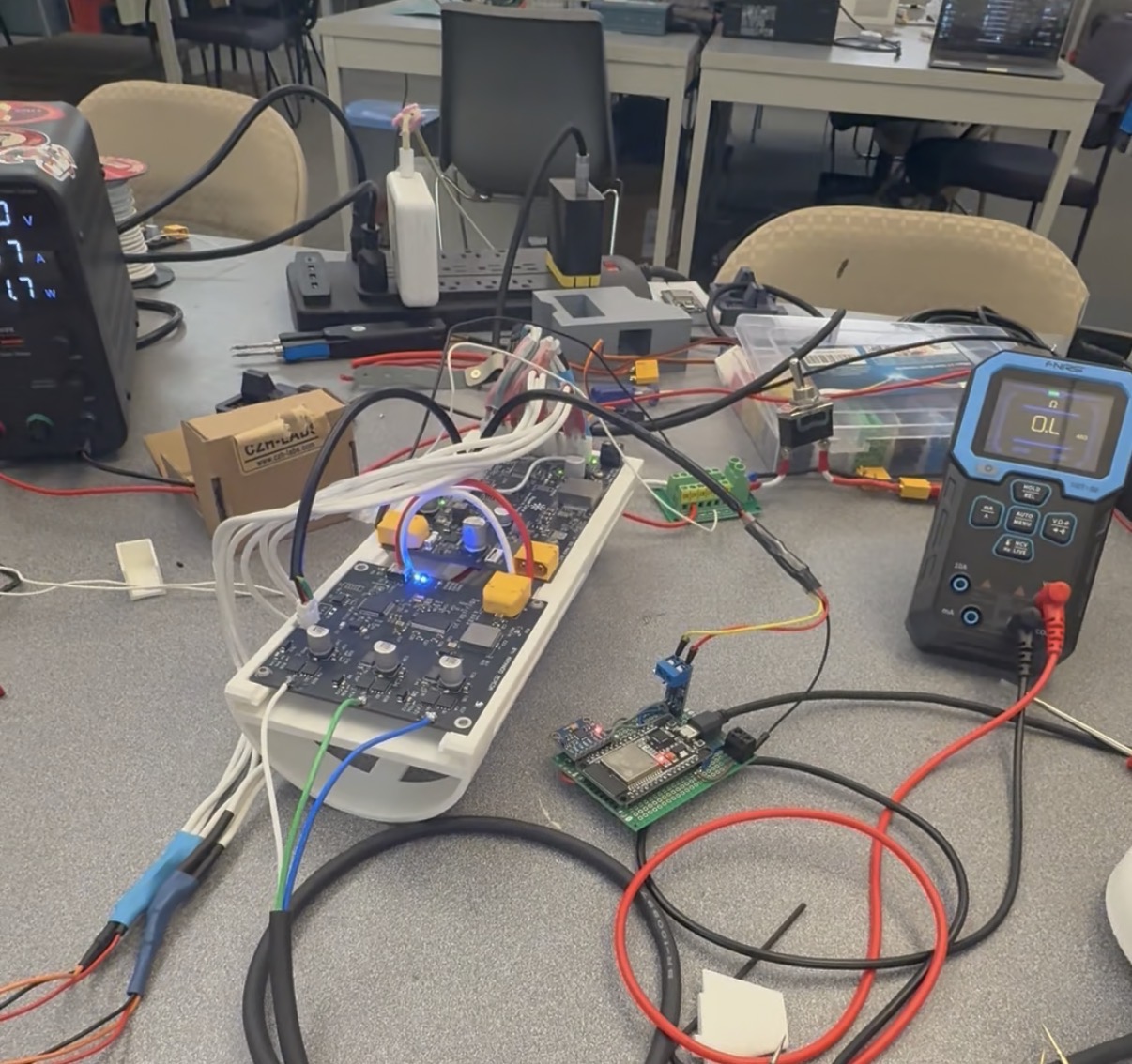
Bench validation of power rails, digital interfaces, and board behavior using oscilloscopes, DMMs, and Python during bring-up.
Power Tree Design
4+ designs
Designed efficient battery-powered power trees using bucks and LDOs, with component selection, power budgeting, and multi-rail distribution for custom PCBs.
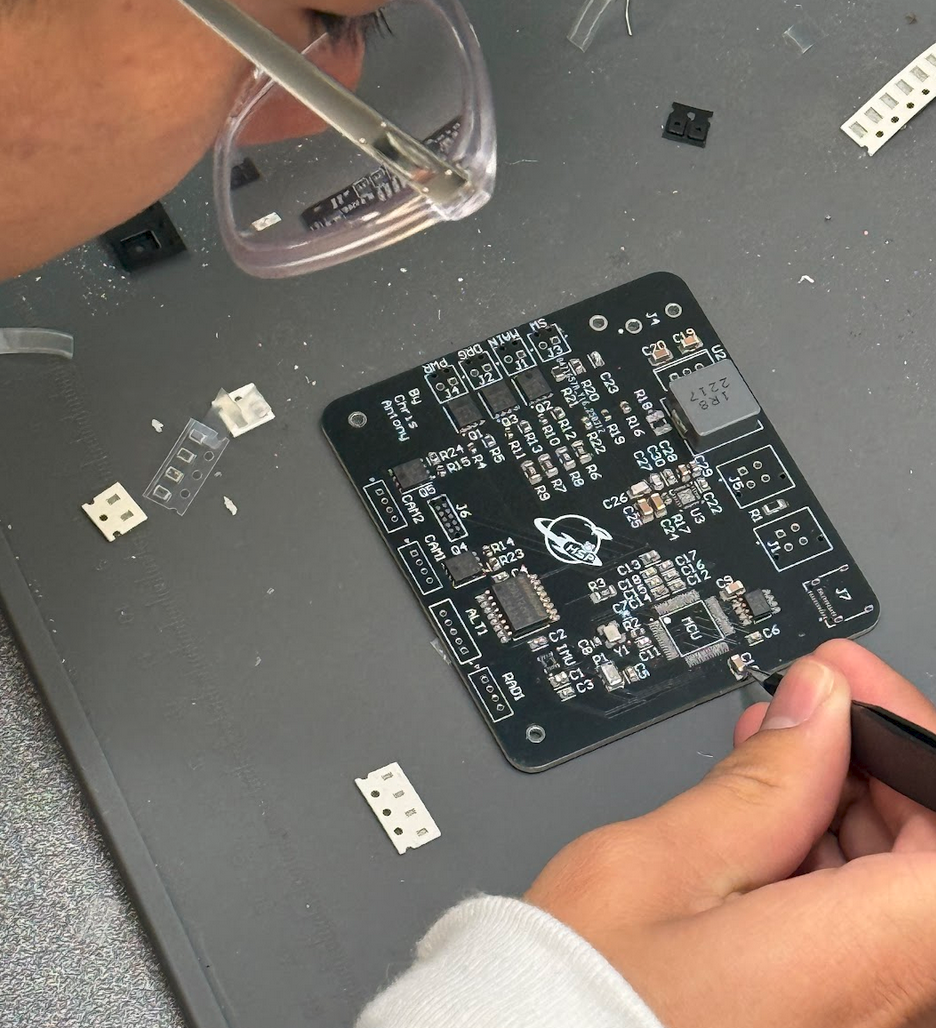
PCB Assembly
10+ boards
Hand-assembled and reworked PCB prototypes for bring-up and validation, including solder, component, and connectivity troubleshooting.
Upcoming Fall 2026 internship.

Upcoming Summer 2026 internship.
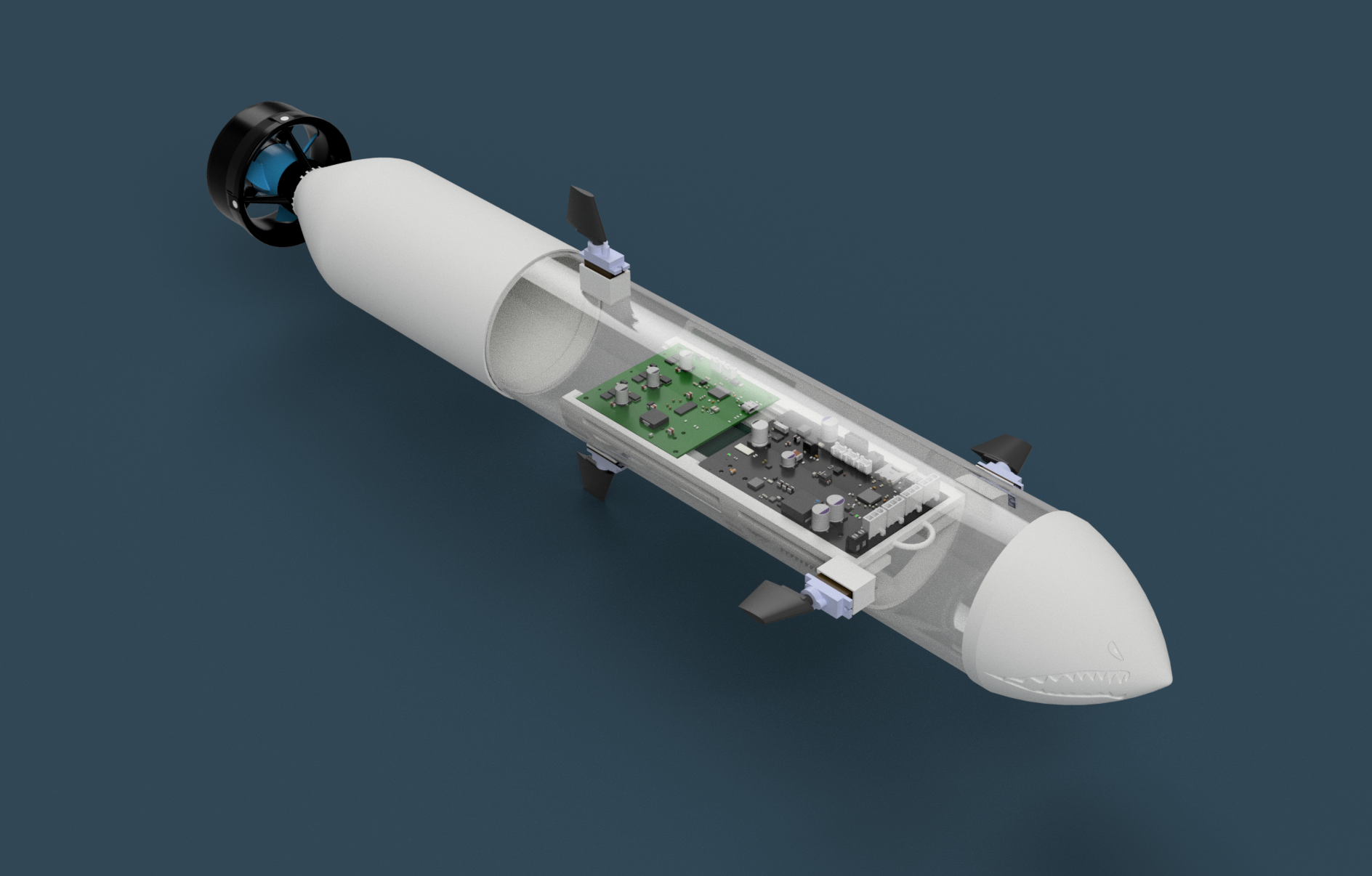
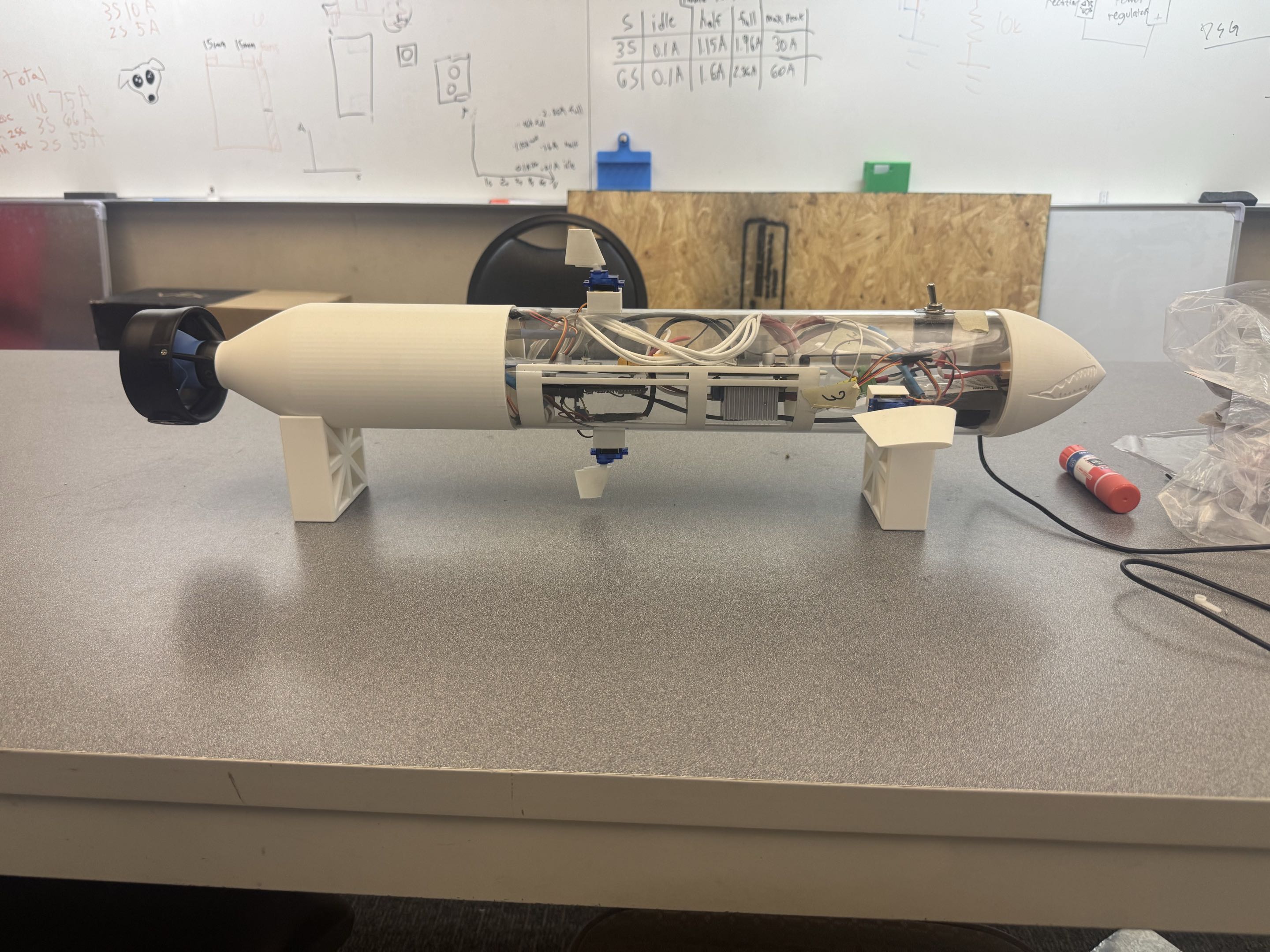
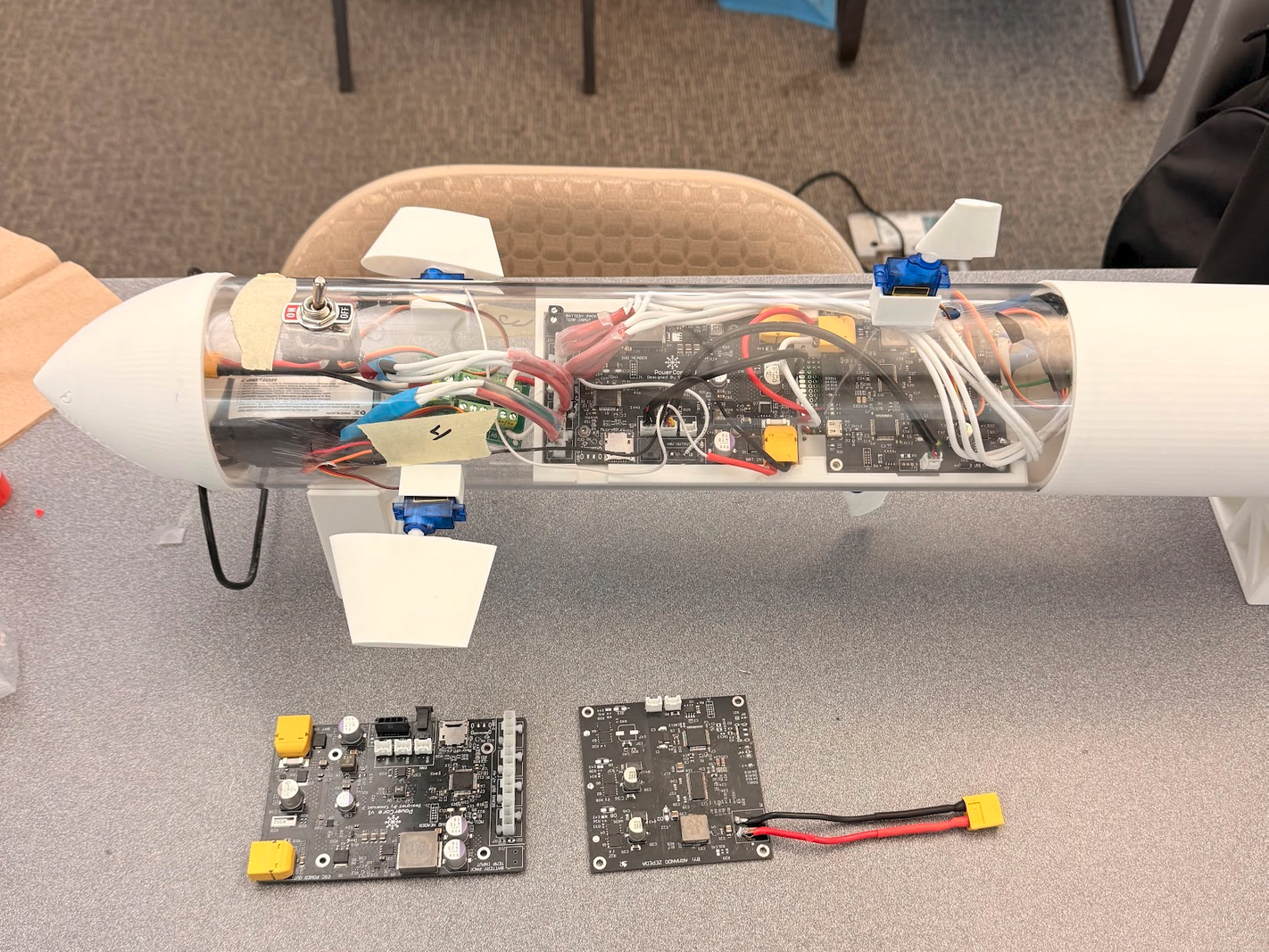
Designing custom electronics for a compact underwater vehicle platform, contributing across power, control, sensing, telemetry, and hardware validation.
Supporting a student liquid rocket team through the full PCB design cycle, from schematic capture and layout to hand assembly and hardware validation.
Supporting PCB design and implementation for a student Formula SAE team in a real build, integration, and test environment.
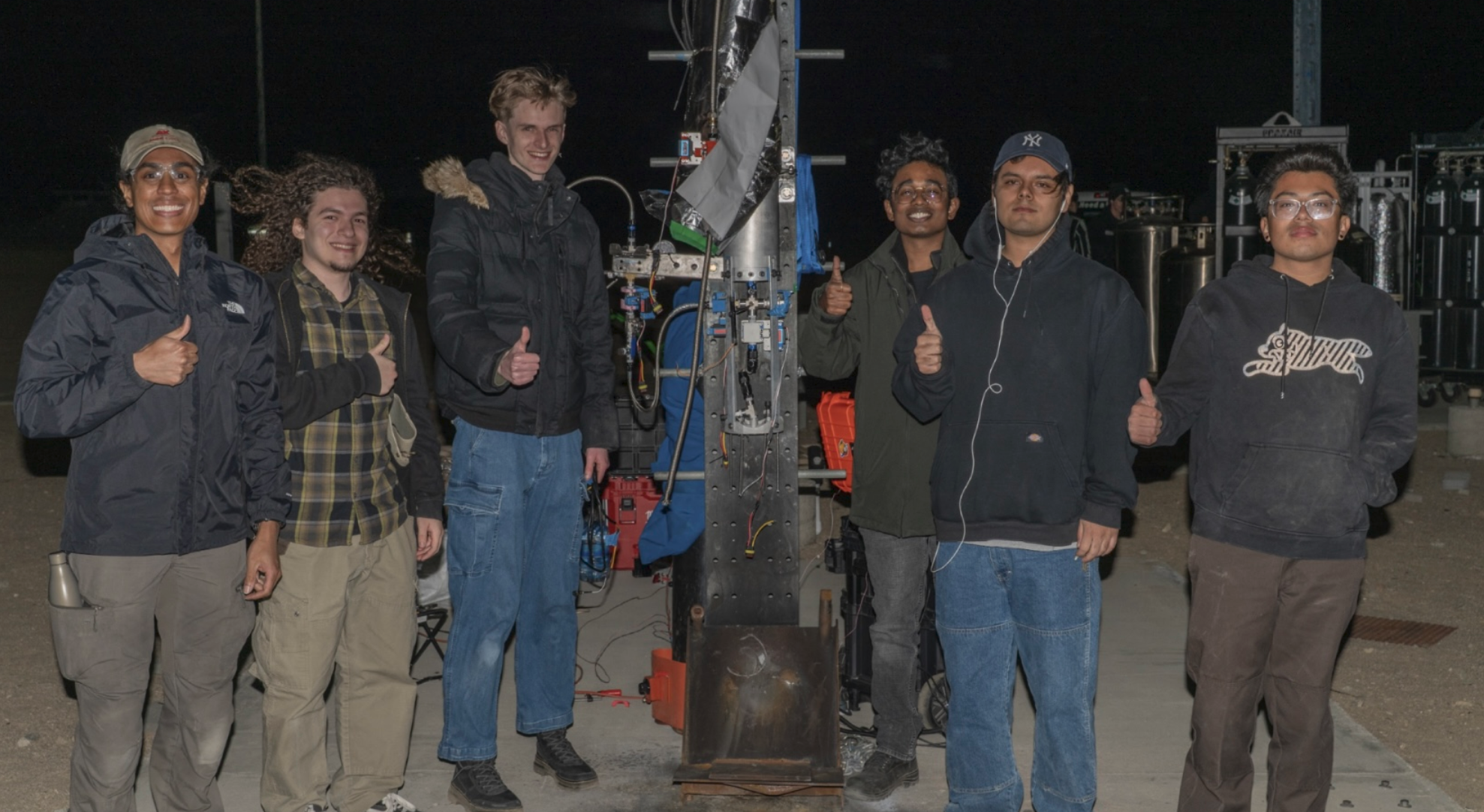
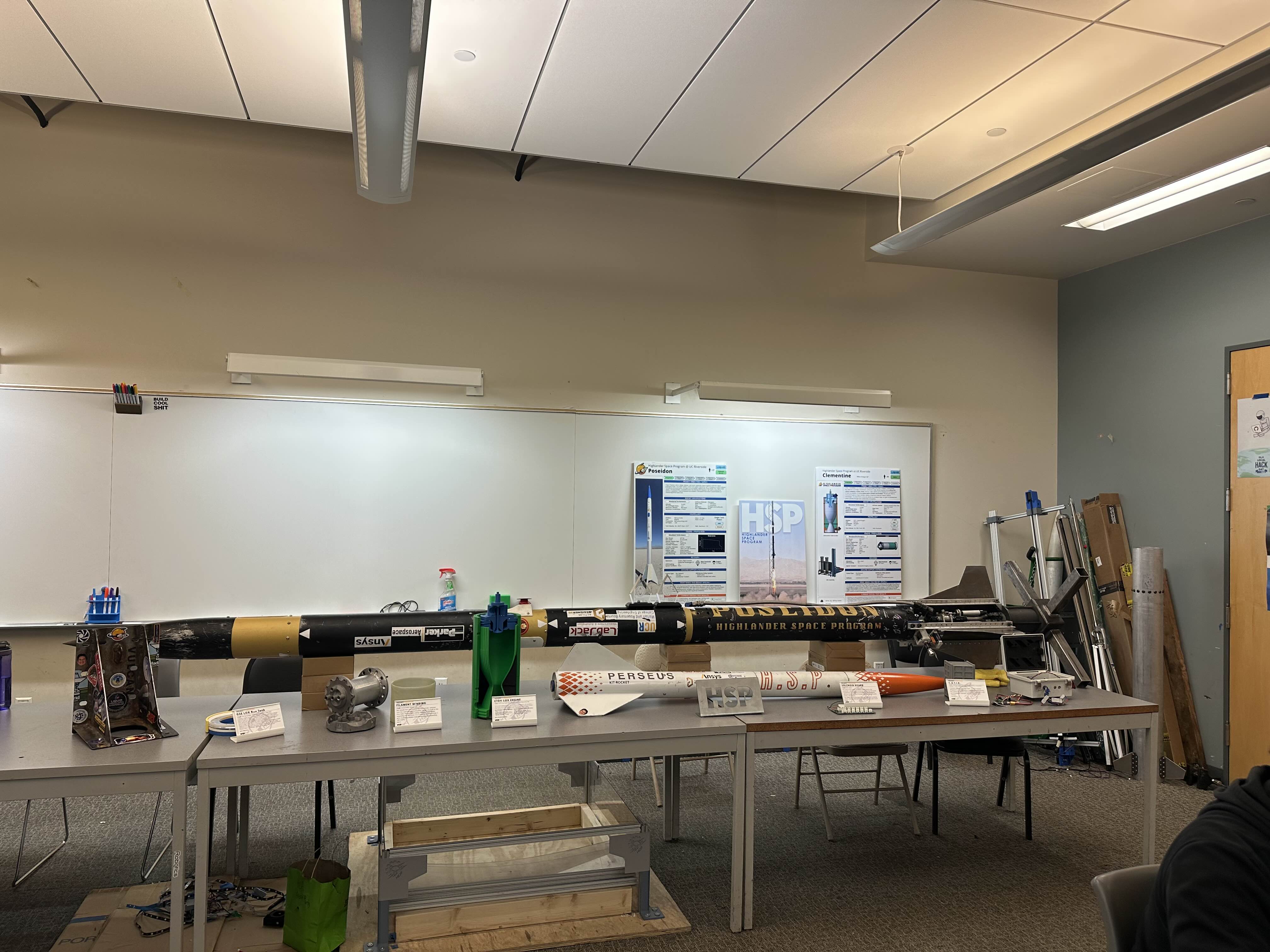
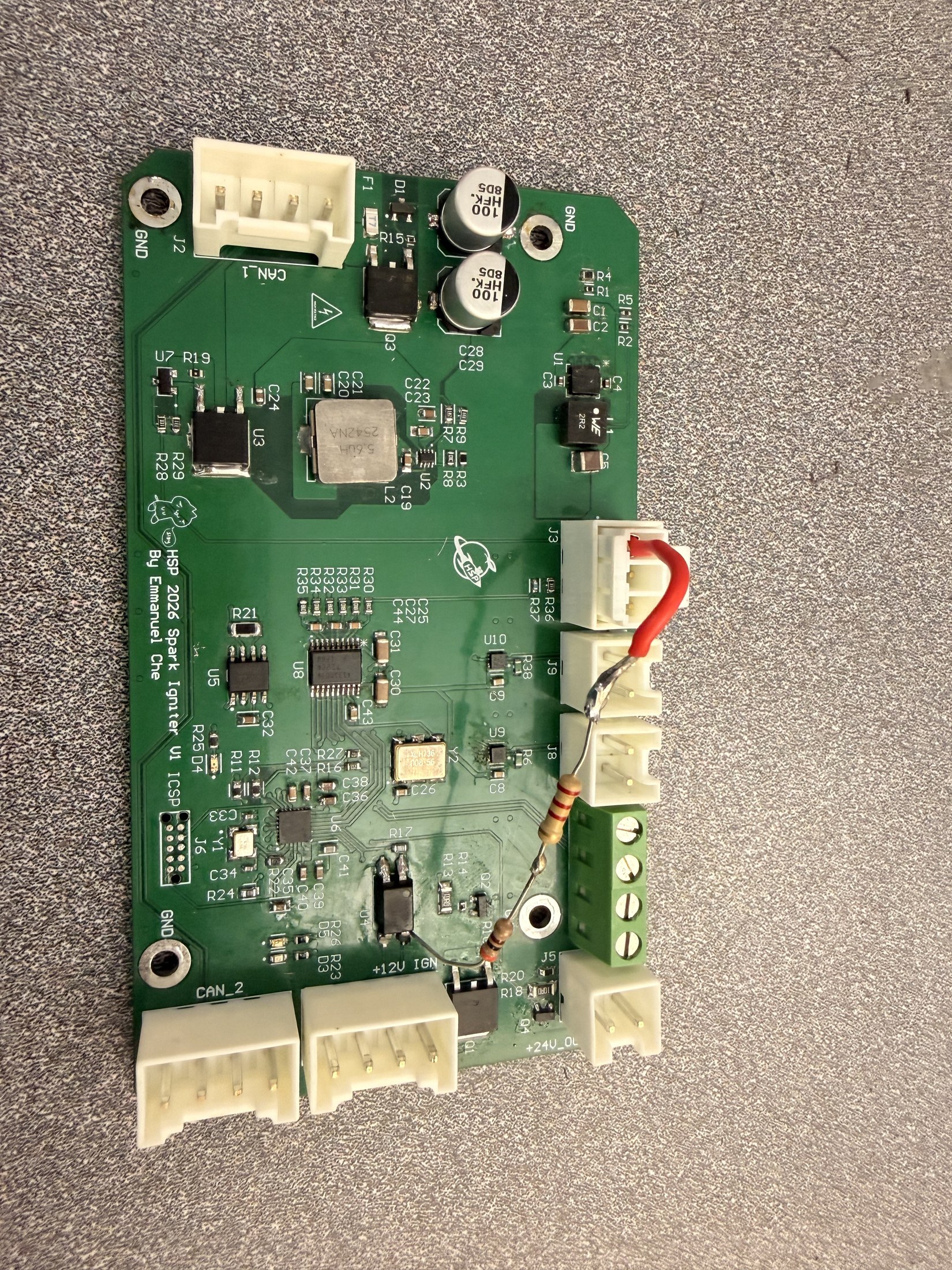
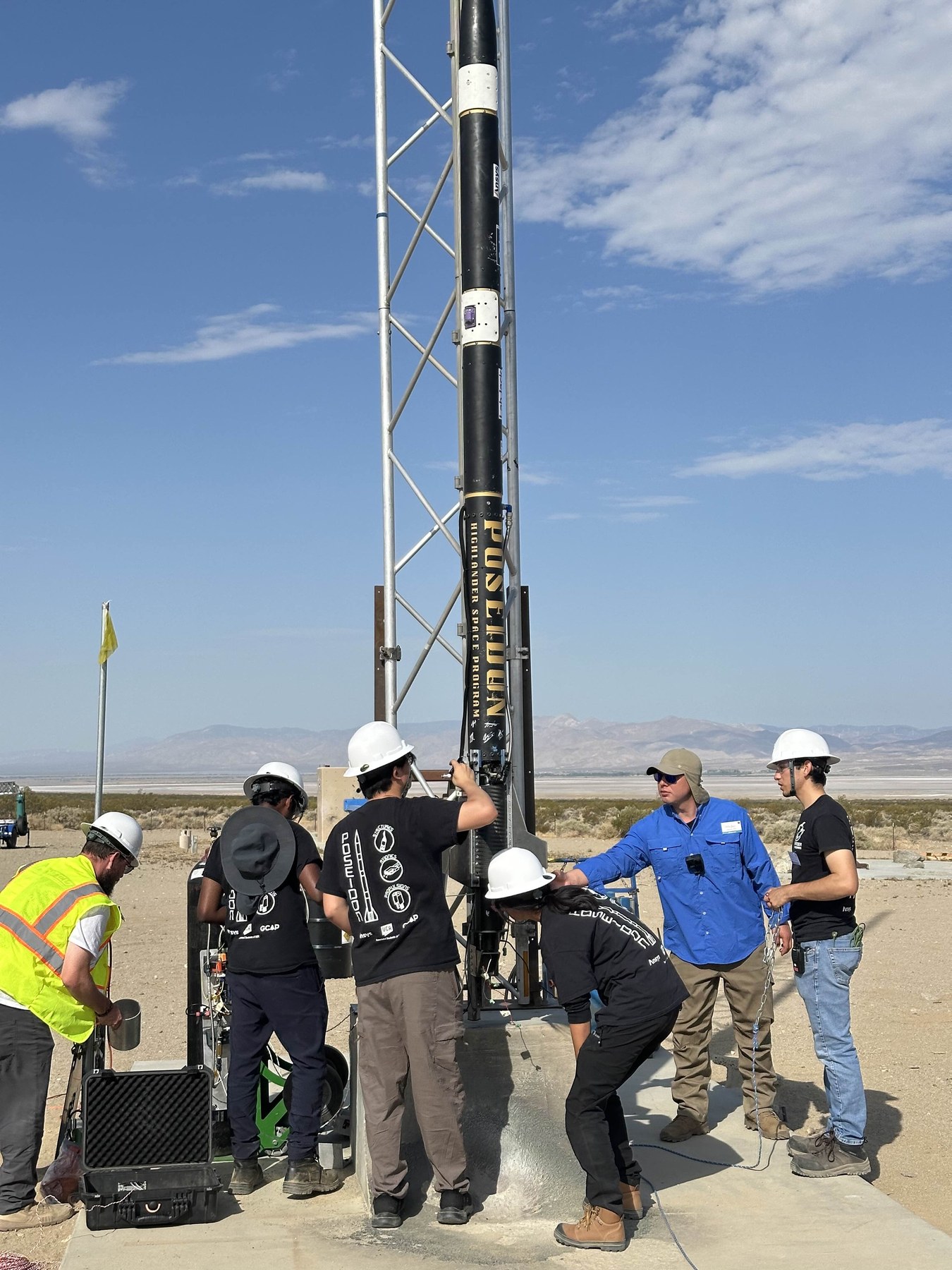
Avionics Hardware Engineer
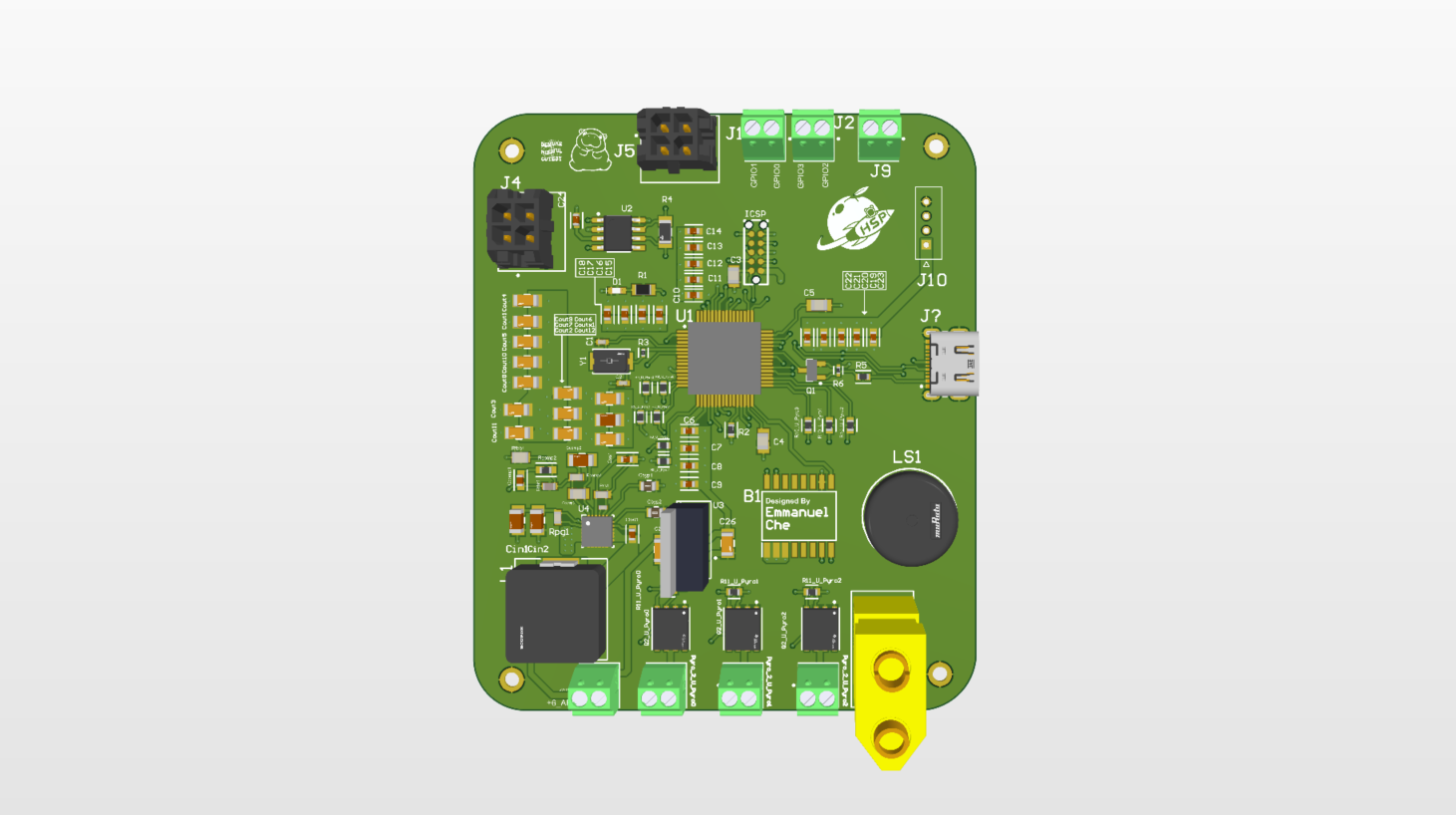
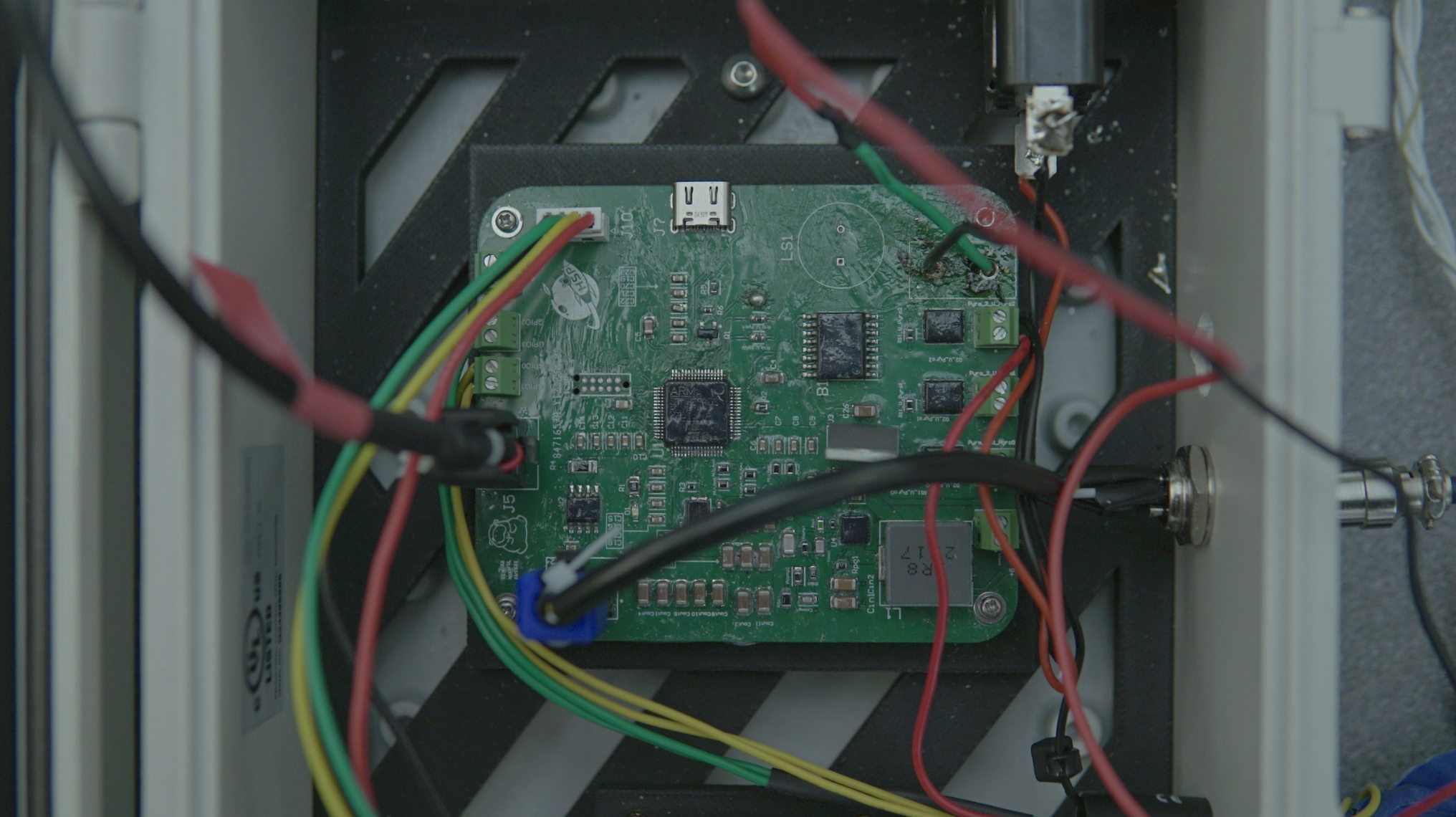
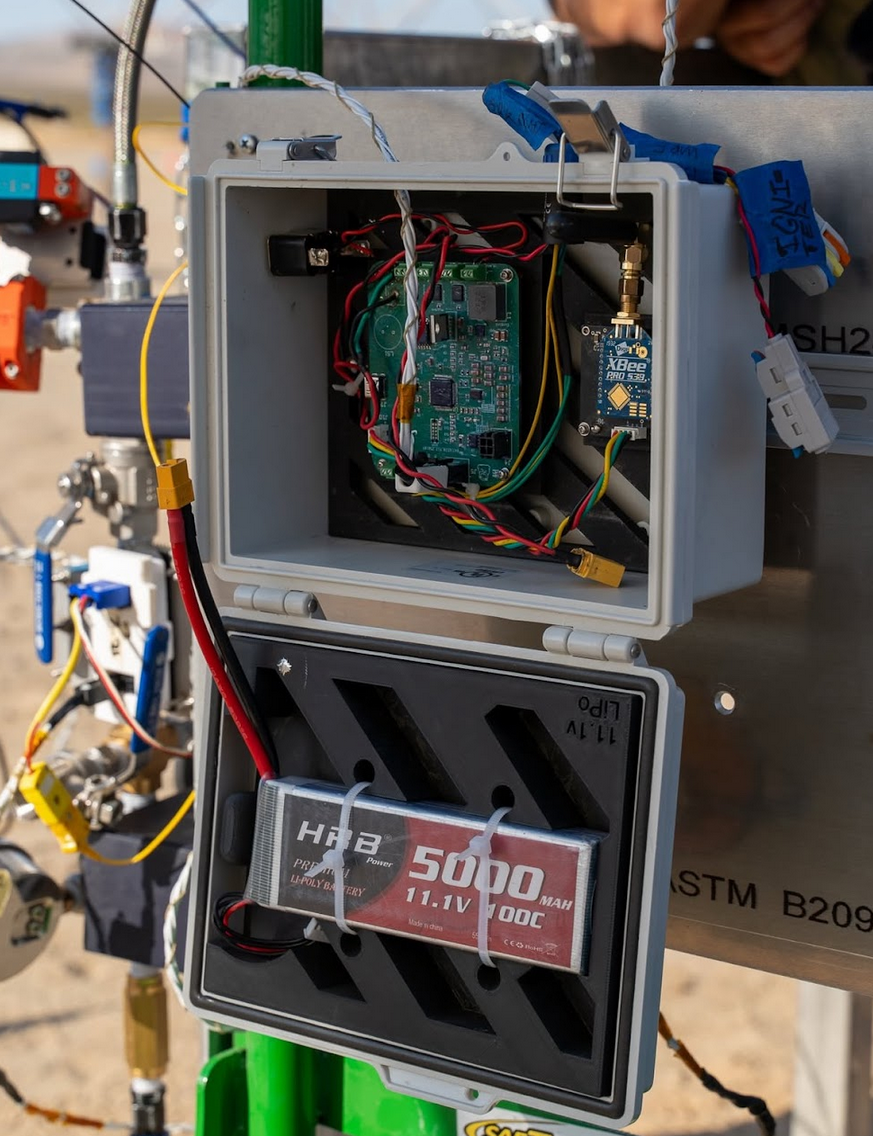
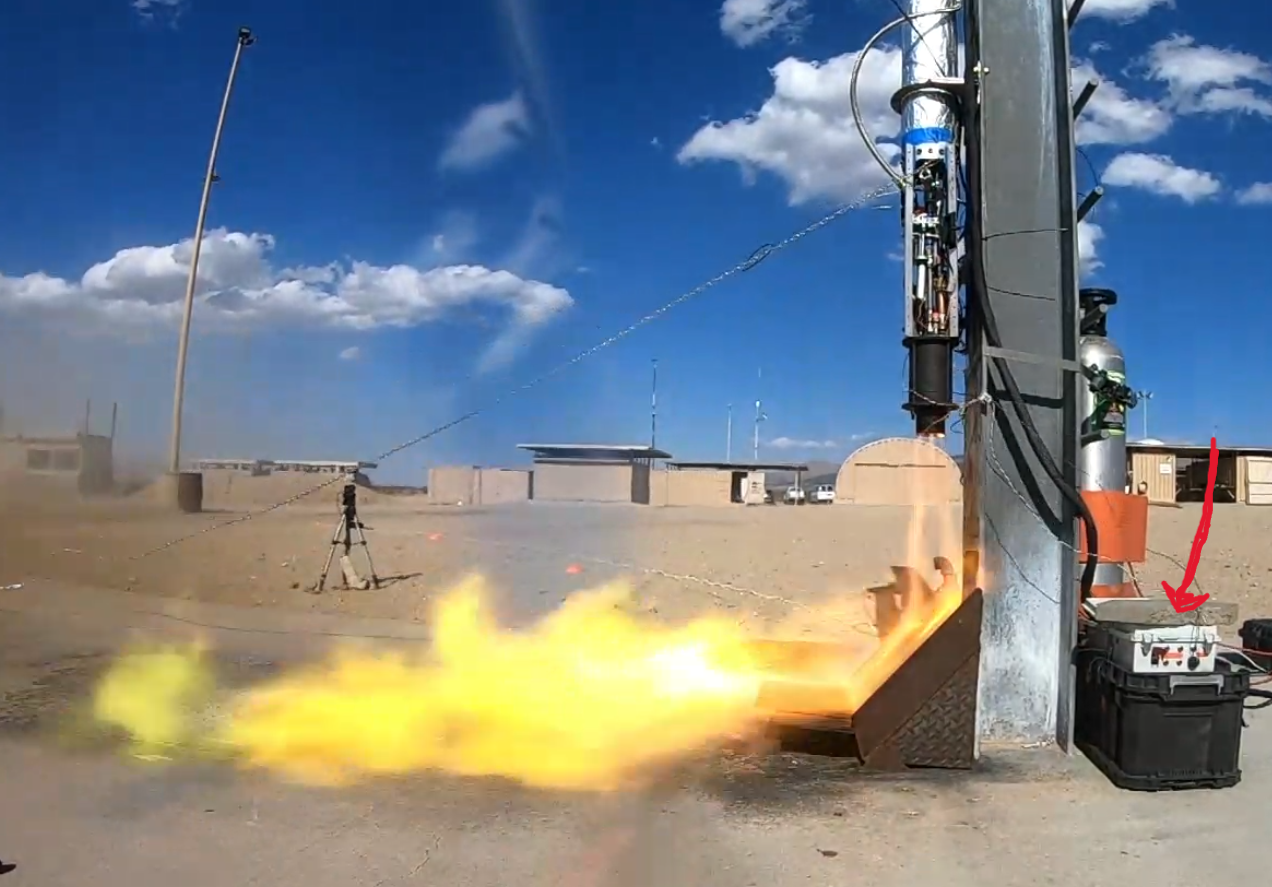
Developing UCR’s liquid rocket program through Project Poseidon, where our team successfully launched UCR’s first liquid rocket. As part of the avionics hardware team, I contributed to custom PCBs used for ignition, fill, fire, telemetry, and ground control, with our upcoming LOX based Project Clementine now in development.
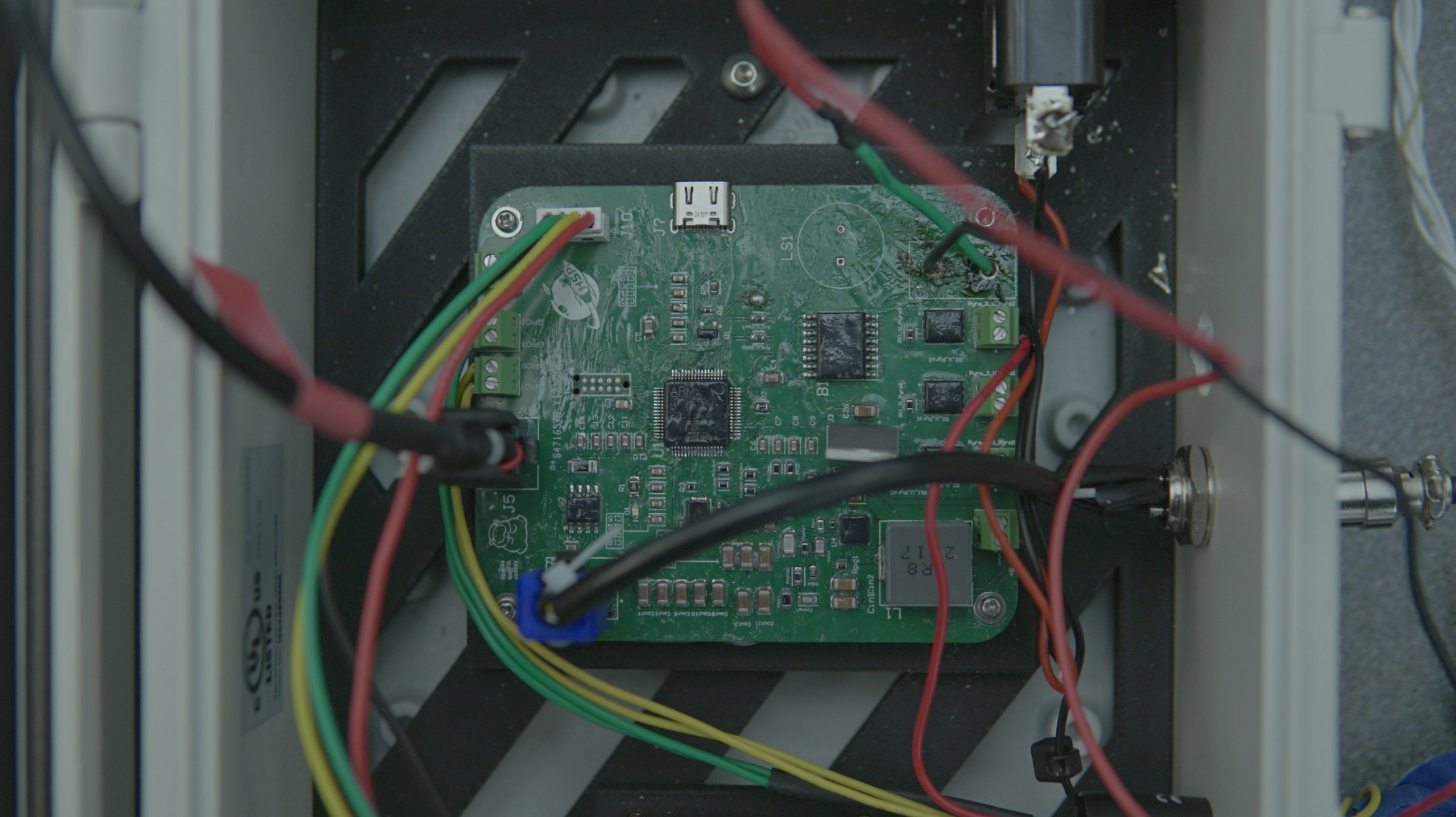
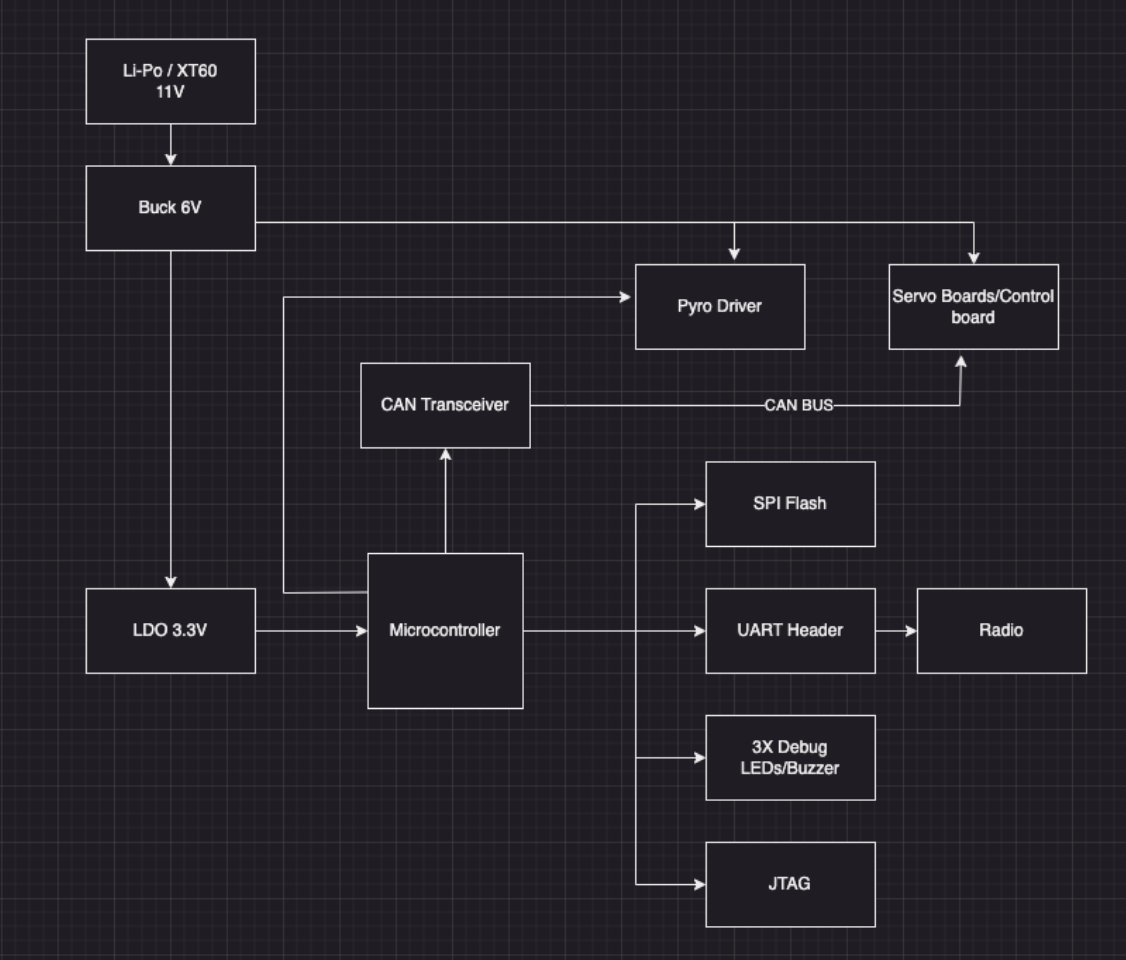
4-layer STM32 ground-control board for remote valve actuation, pyro control, CAN distribution, and pad-side command handling.
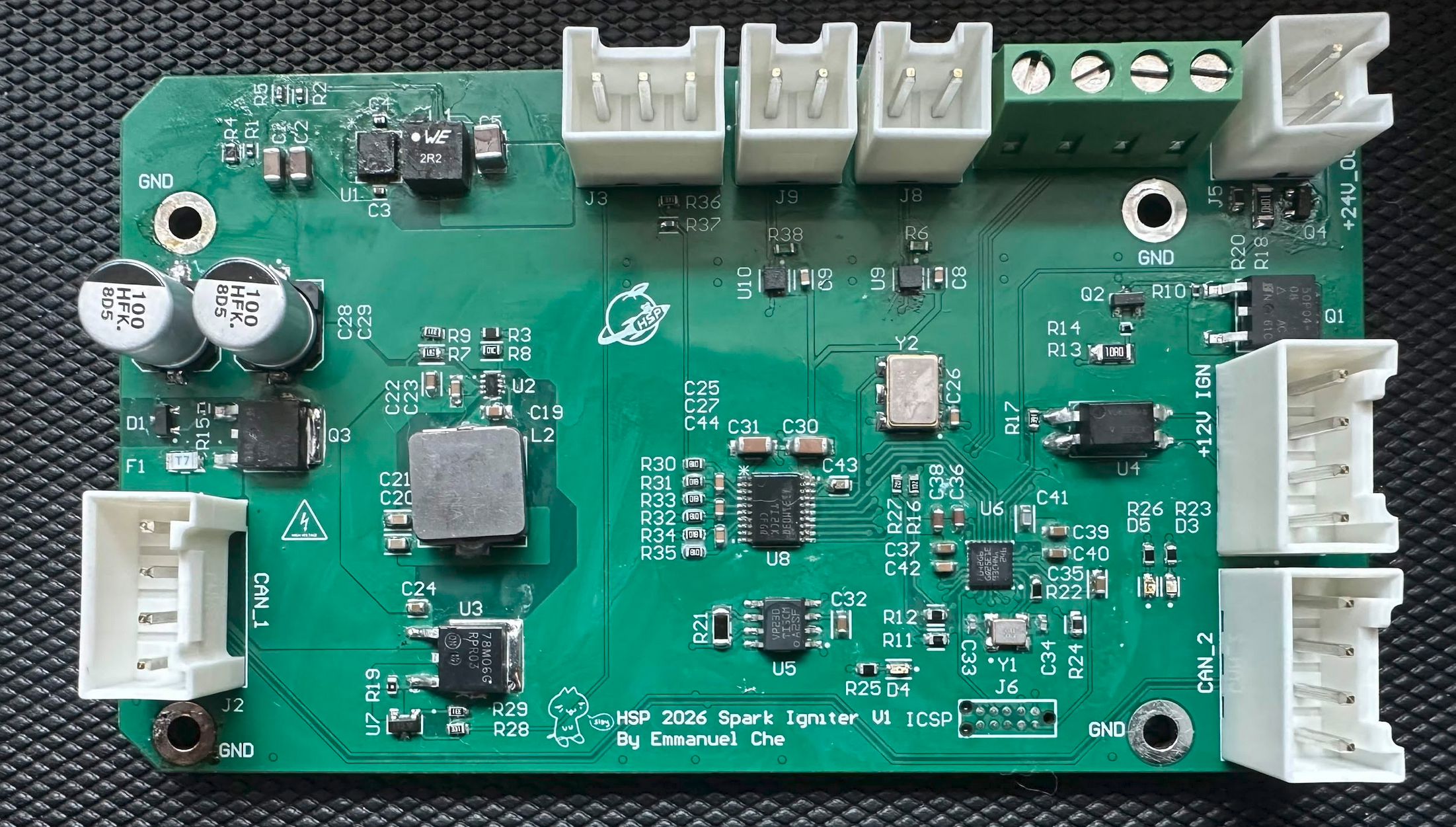
Remote CAN ignition and instrumentation node with 24V input, local rails, heater switching, and analog sensing.
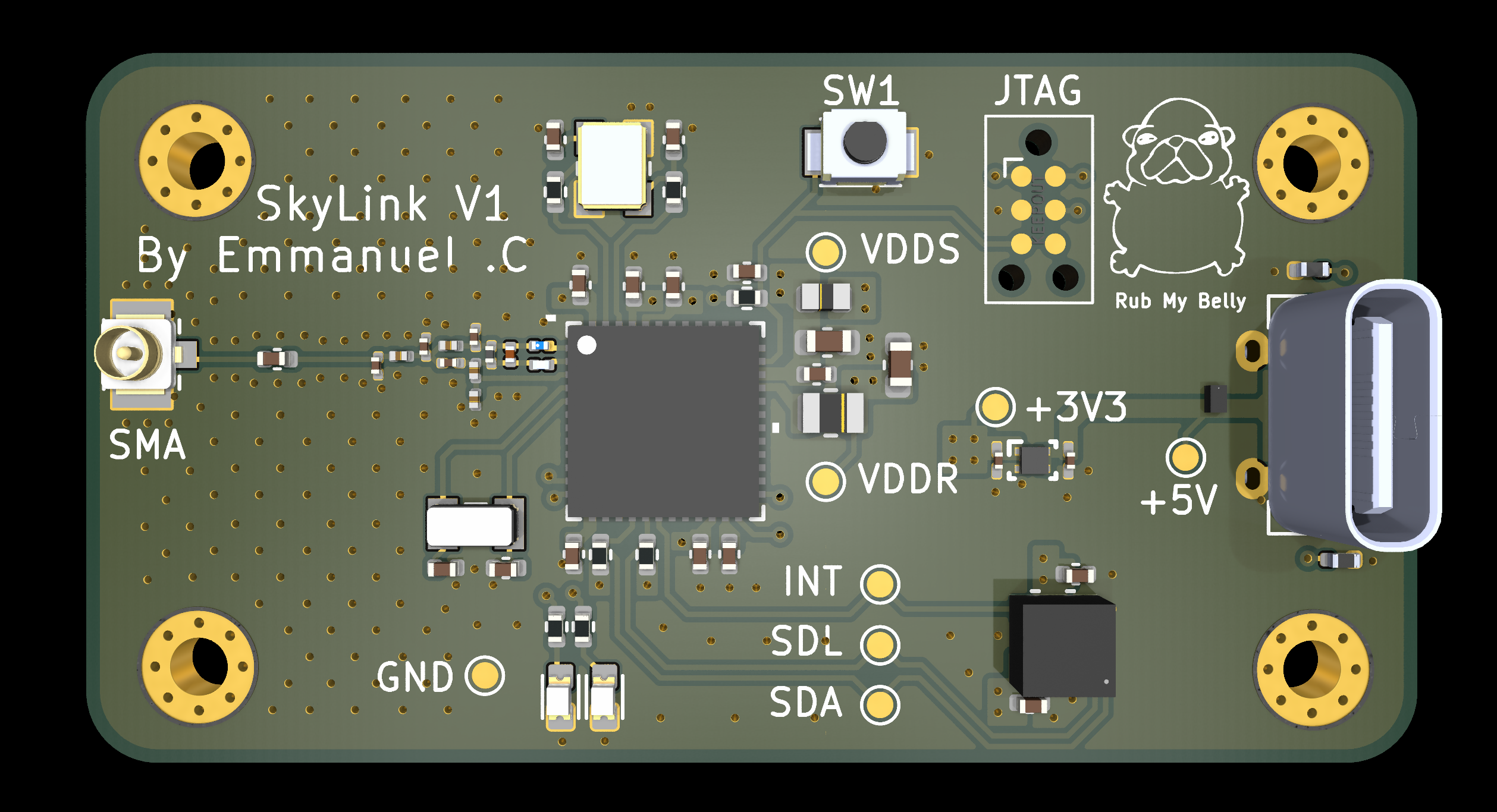
4-layer KiCAD RF telemetry and sensing board for Project Clementine with controlled-impedance SMA routing, RF matching, and onboard sensing.
Project Lead / Hardware Engineer
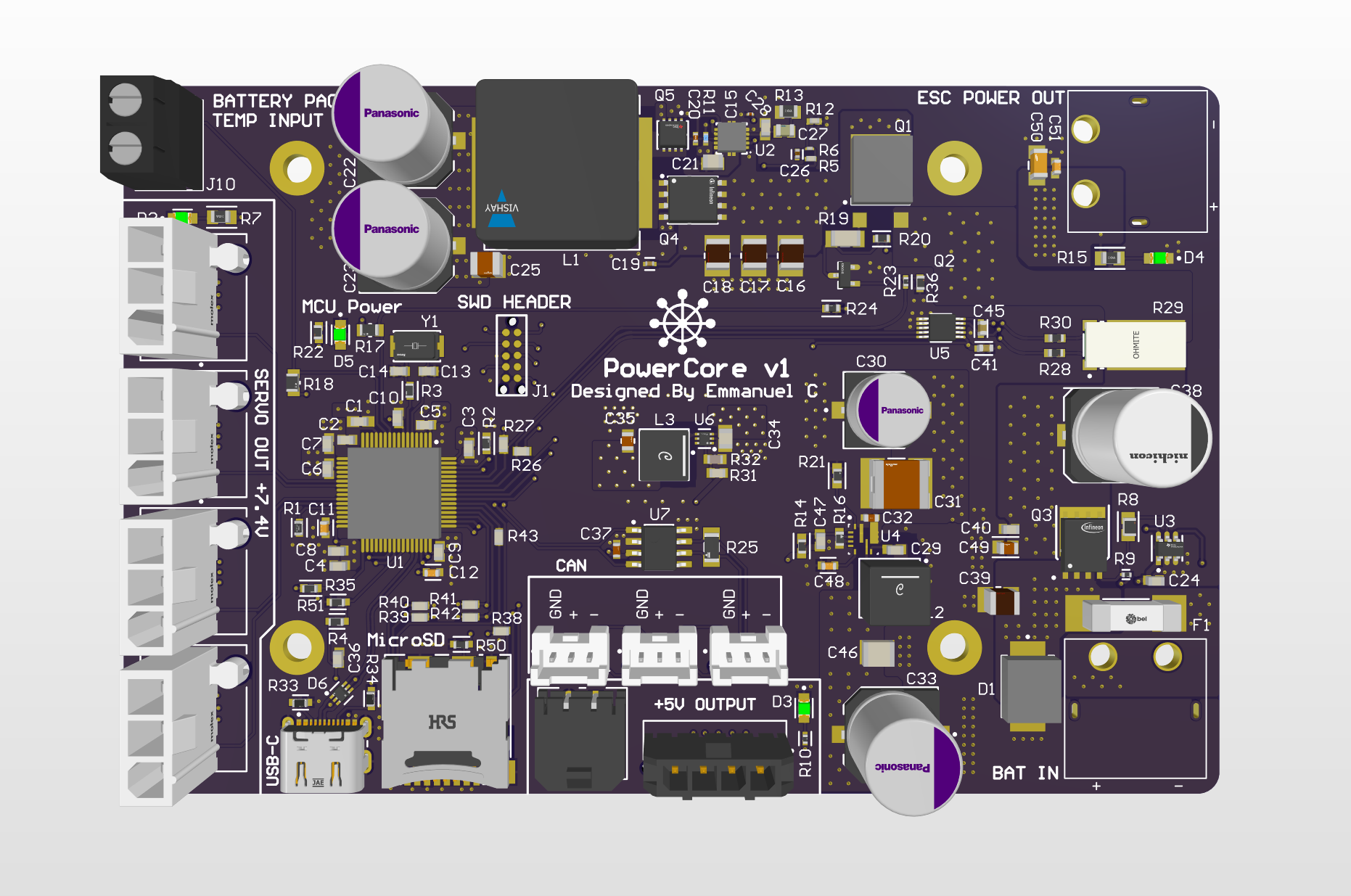
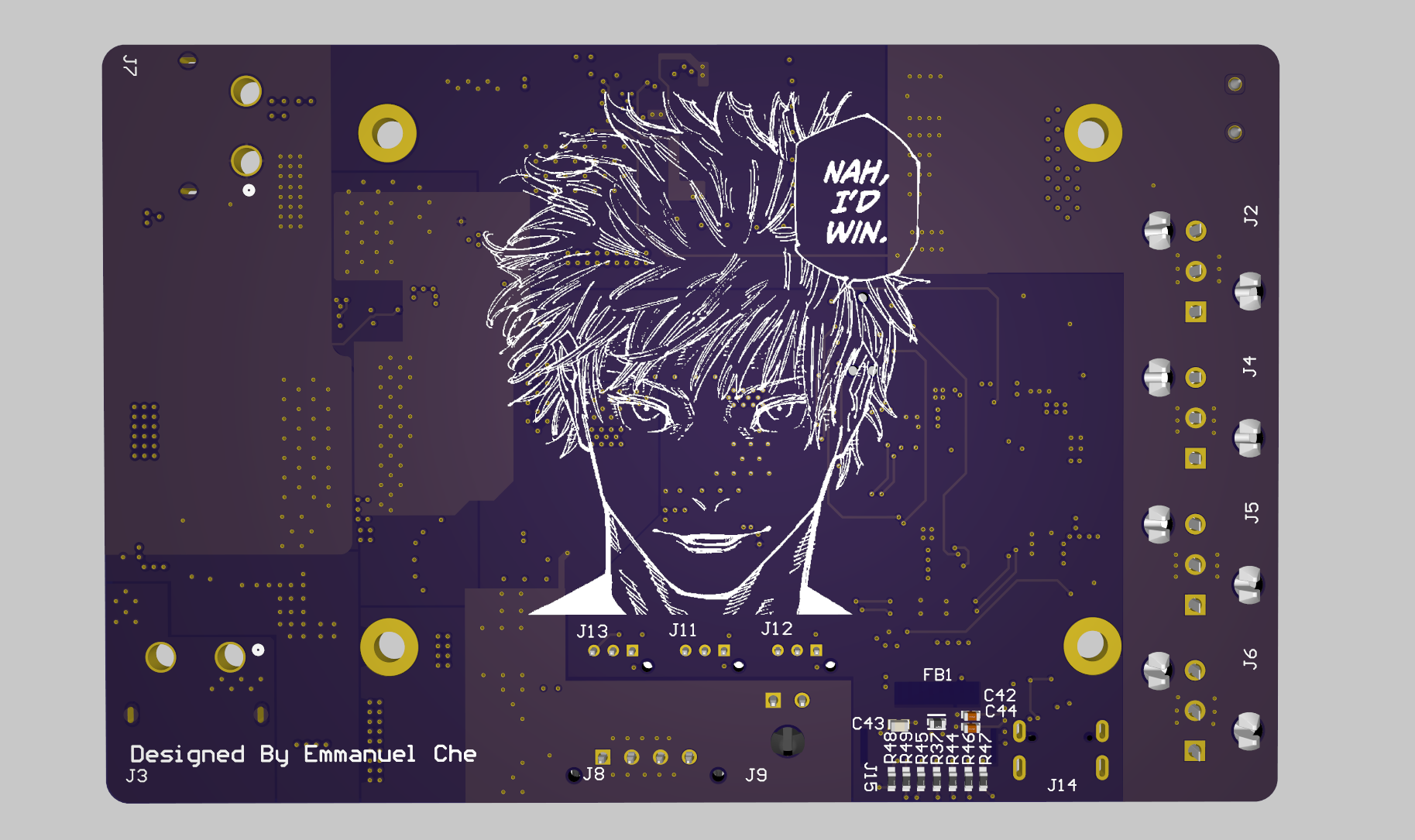
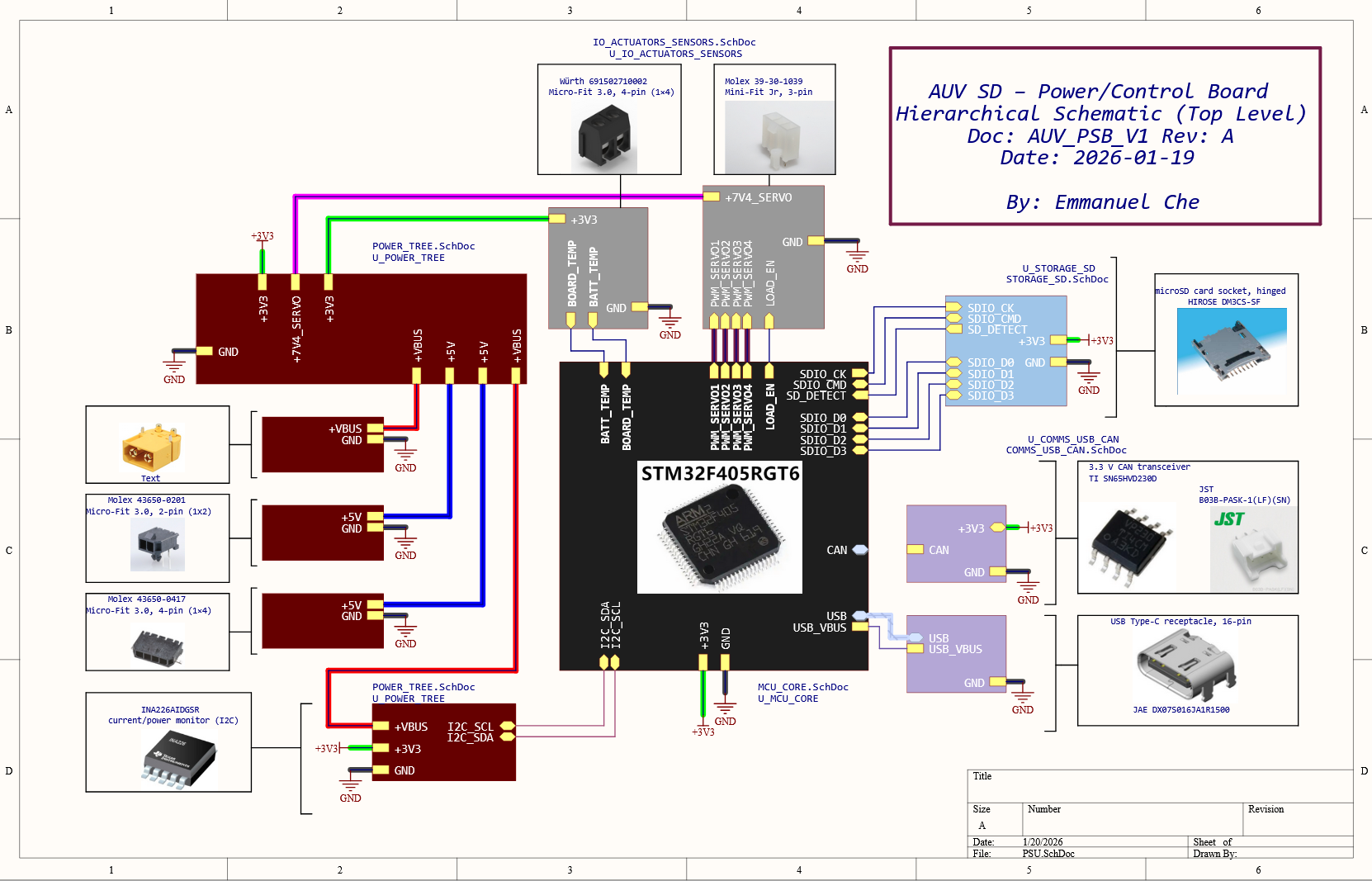
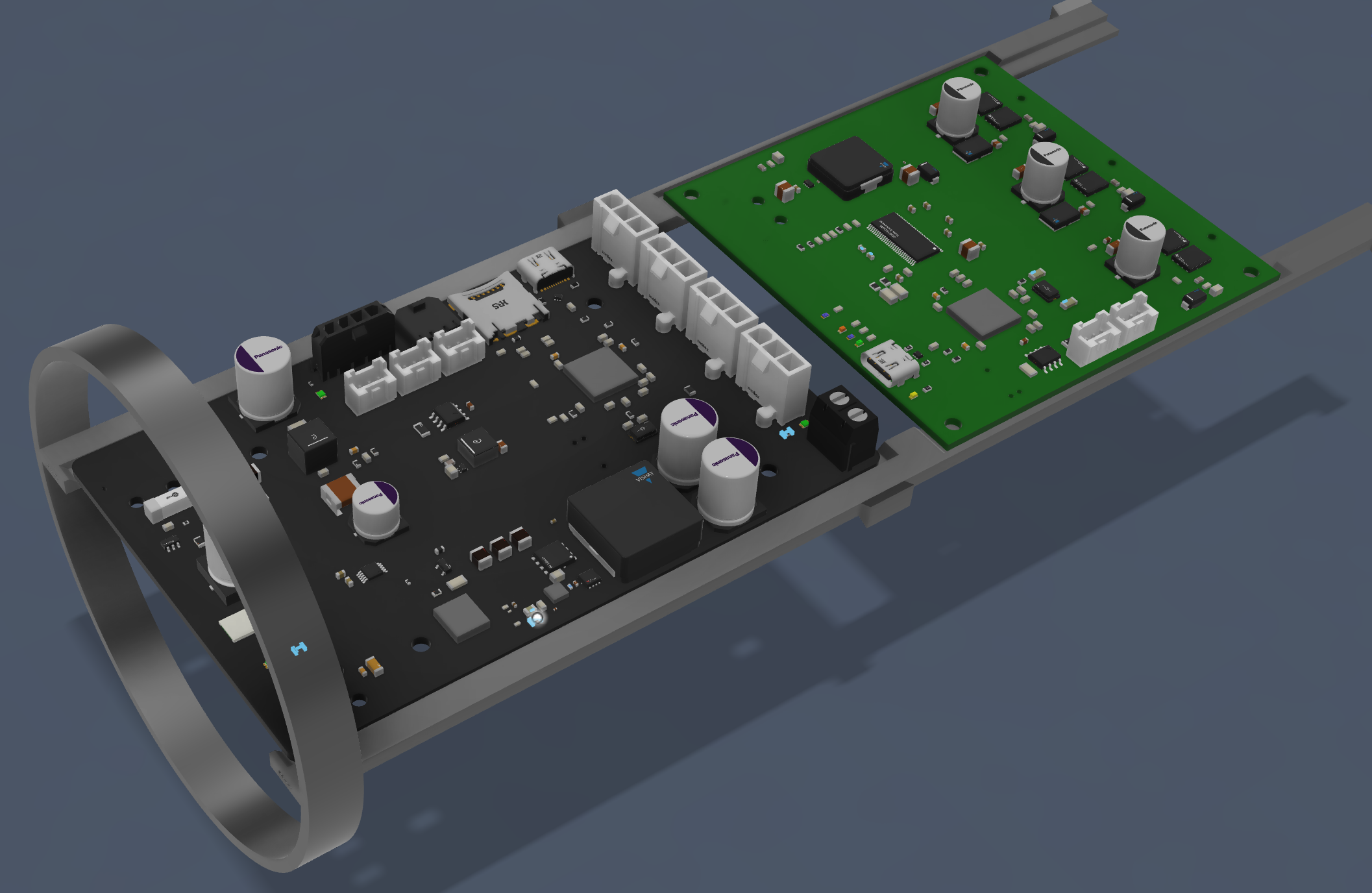
Our goal is to build a compact autonomous underwater vehicle focused on full custom electronics and firmware for mission capture, navigation, and sonar based detection. I work directly on integrating our custom PCBs and firmware into the electronics test setup.
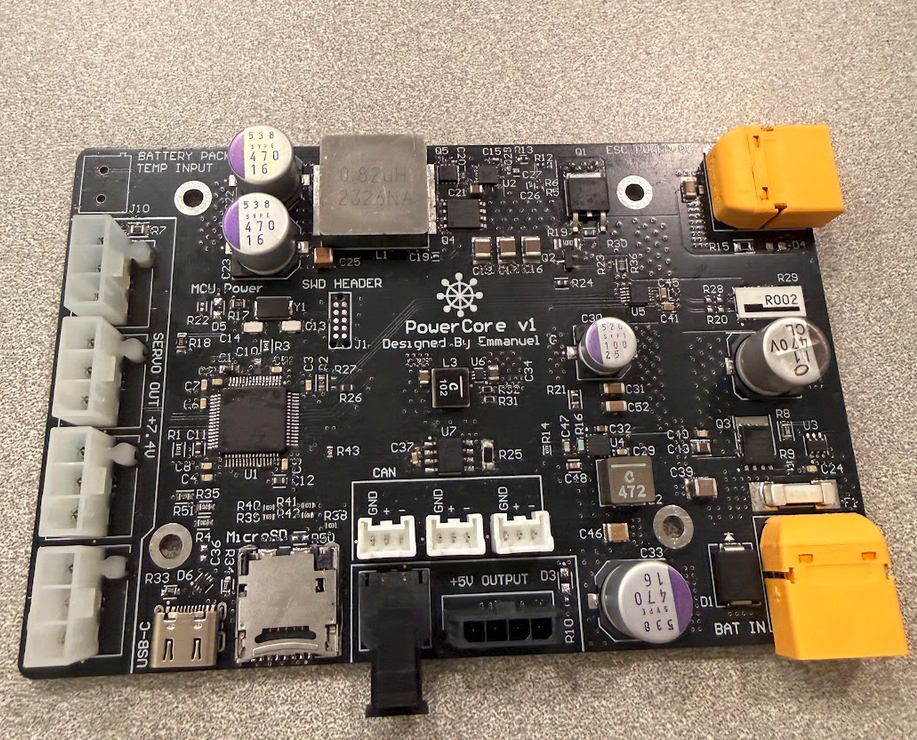
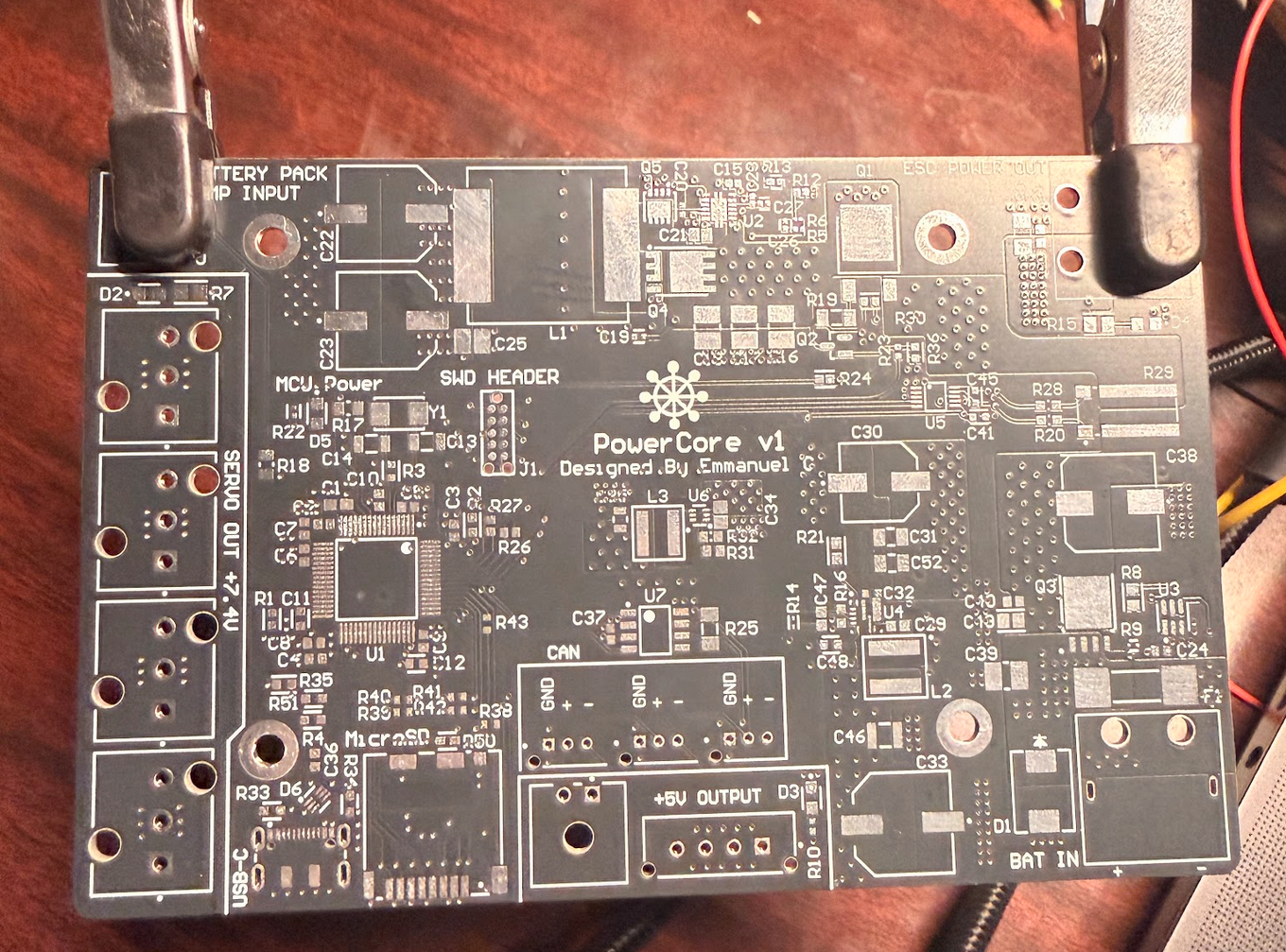
4-layer mixed-signal board for protected 4S LiPo input, multi-rail power, CAN telemetry, current sensing, and SD logging.
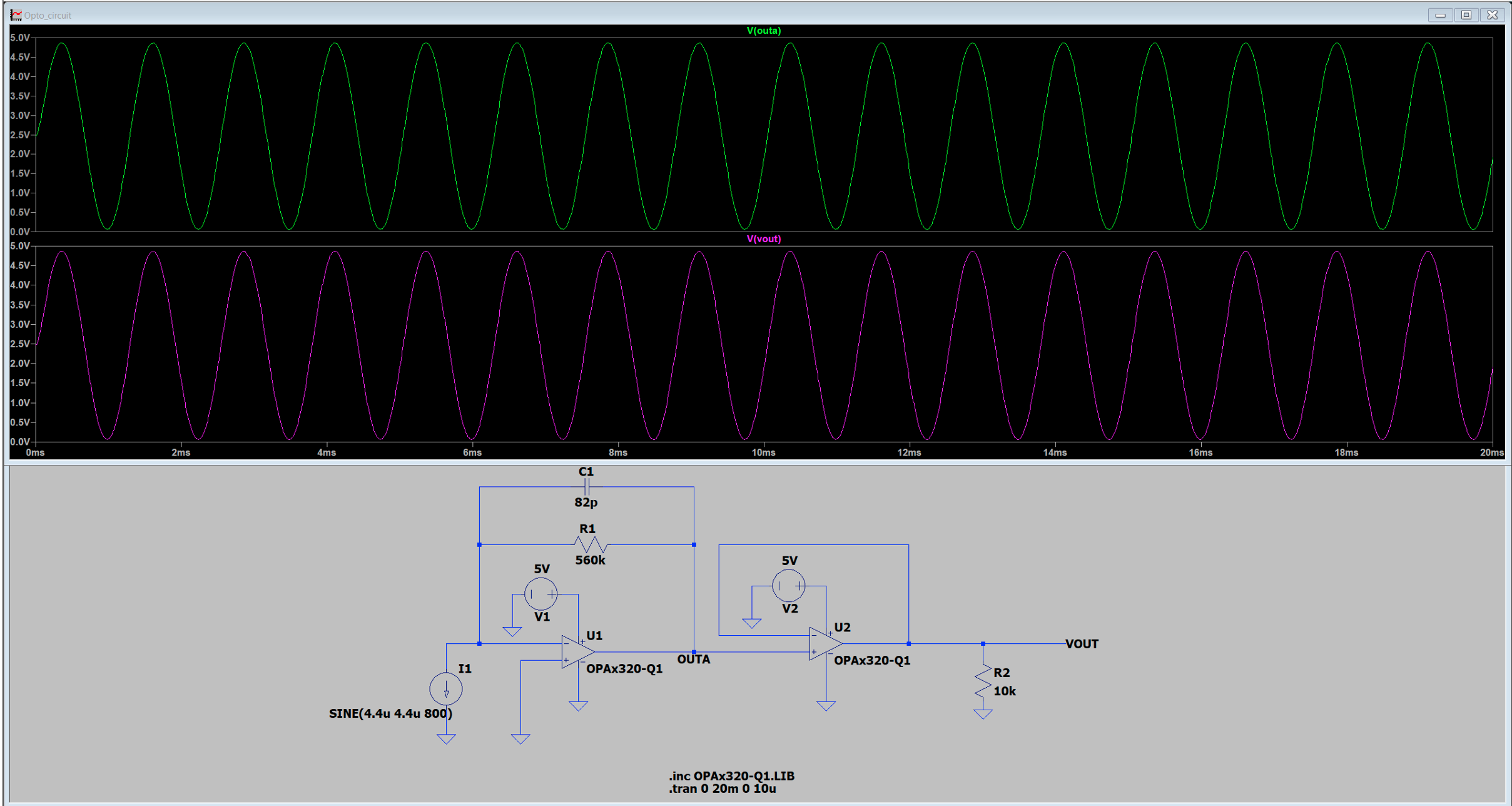
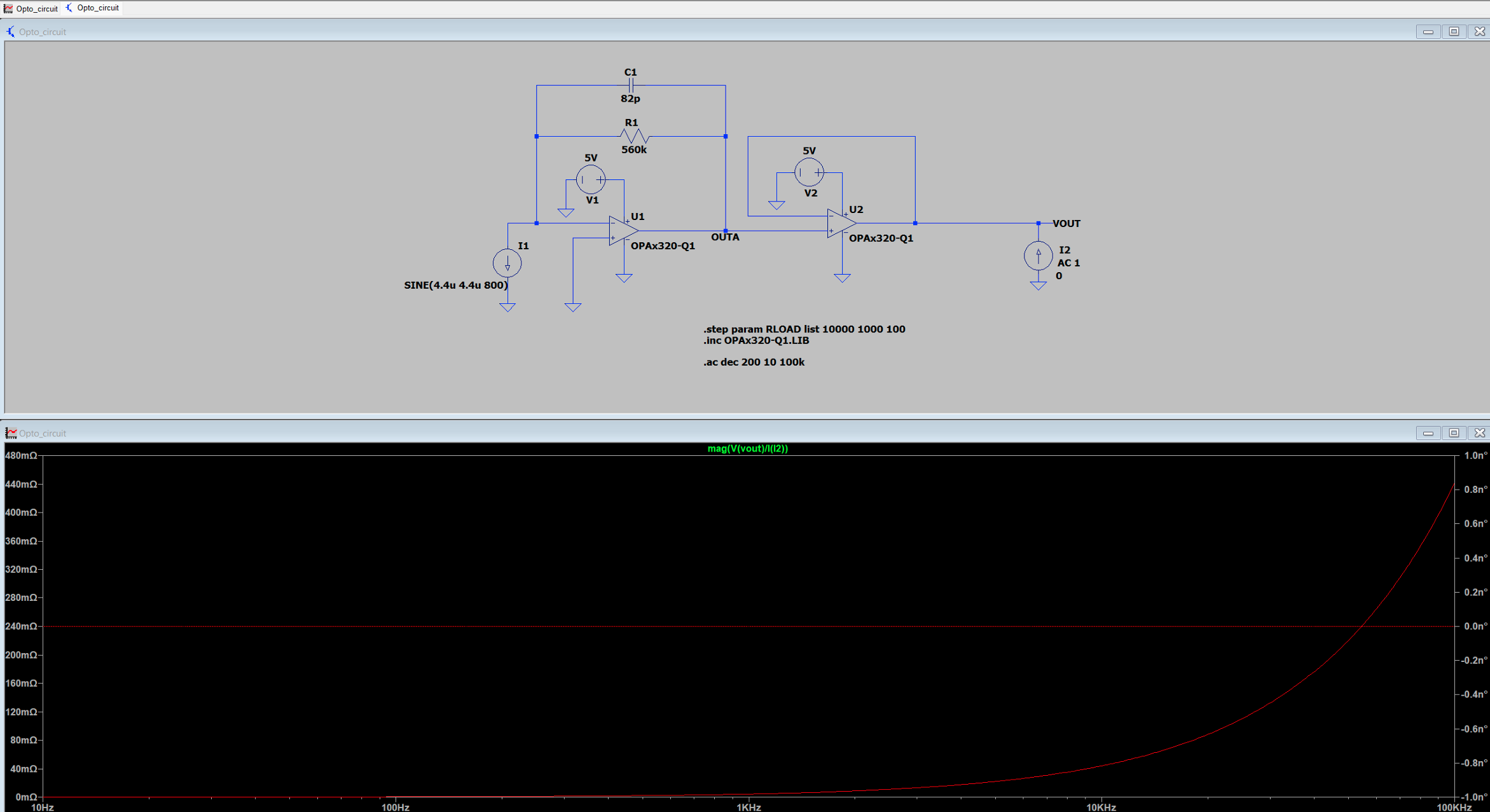
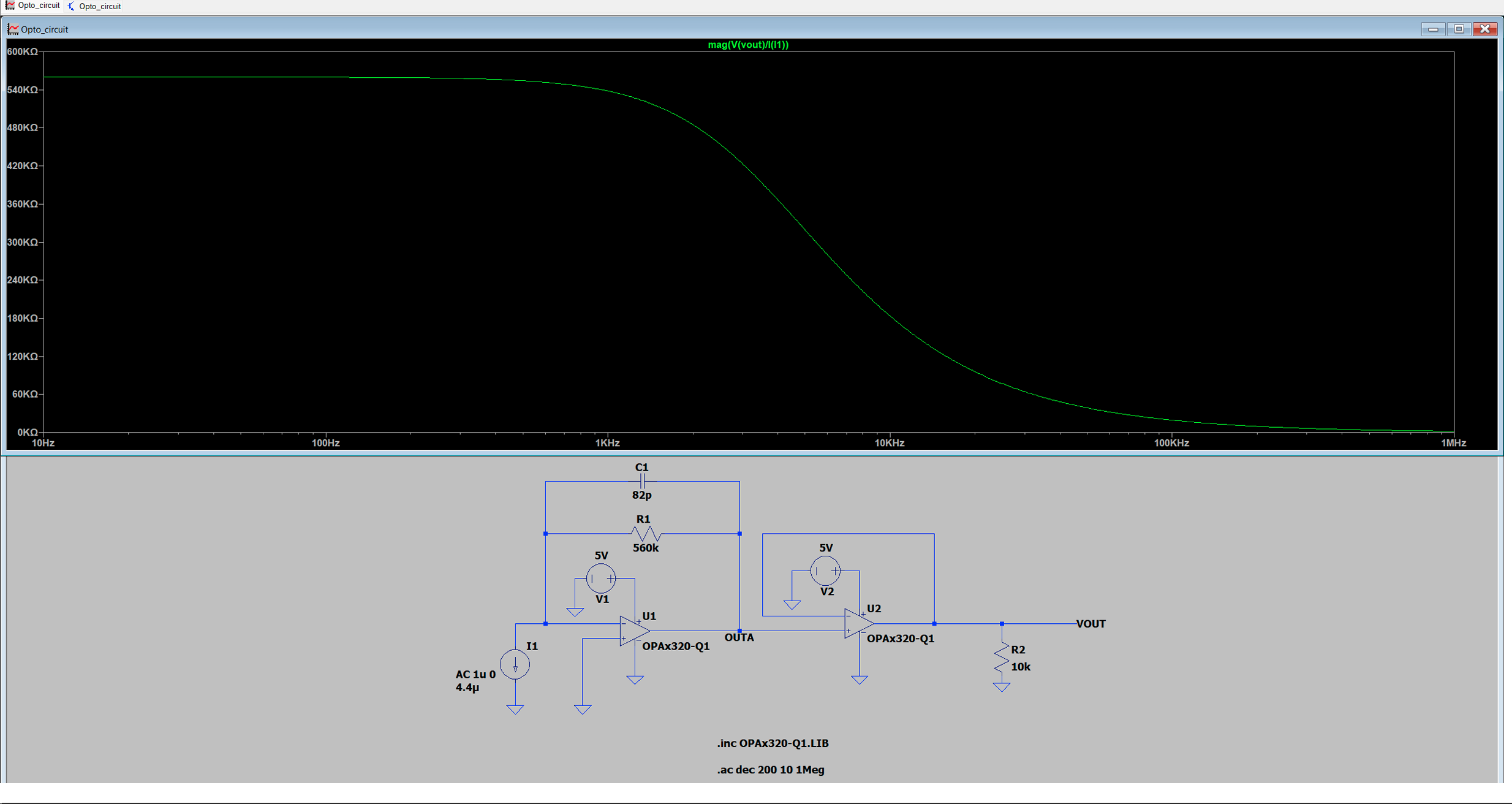
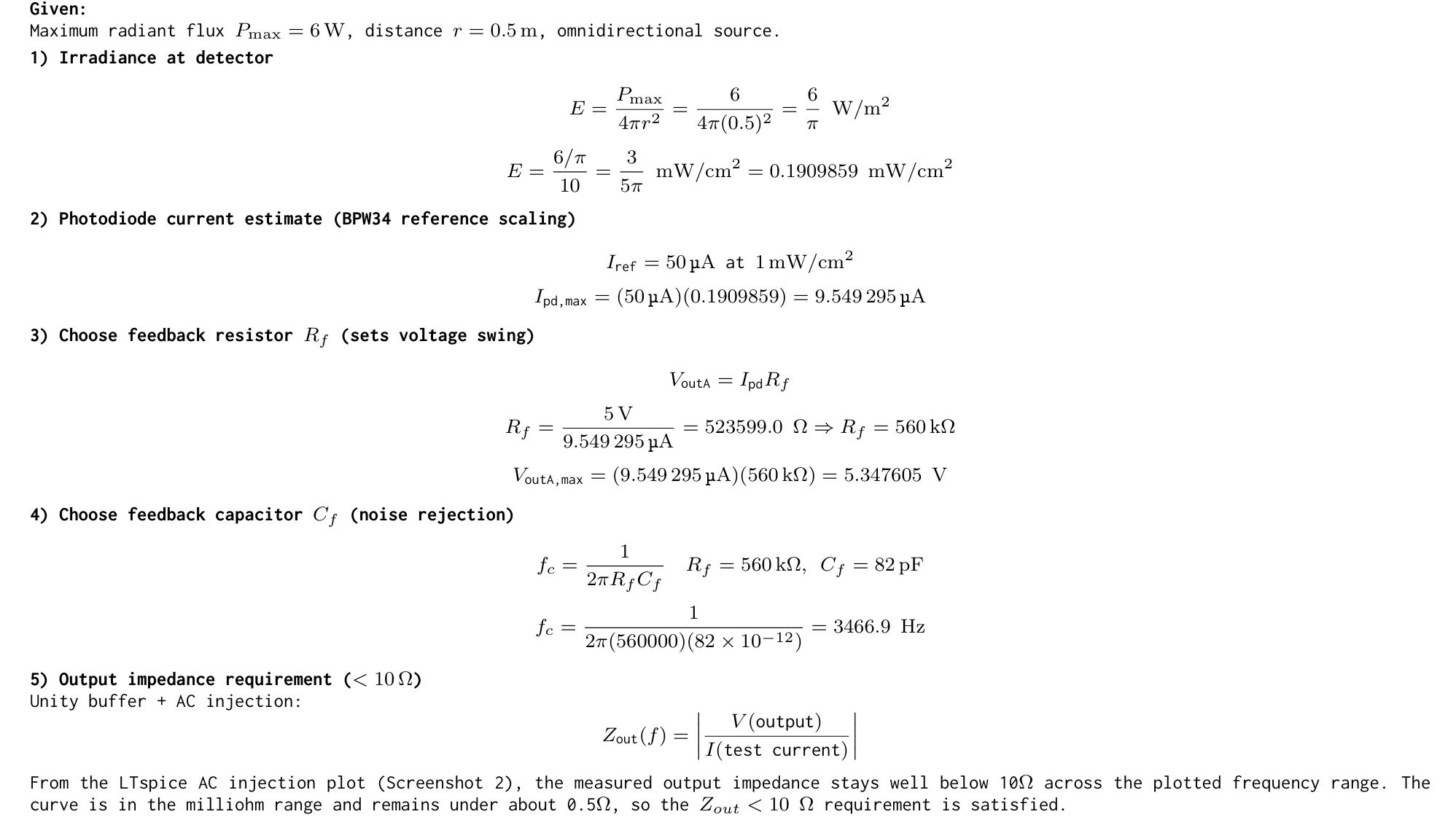
Additional circuit work
Transimpedance amplifier and buffer chain for a clean 0 to 5V light-sensing output with noise rejection.
Hover or tap to flip.
Hey, my name is Emmanuel.
Most of my time goes into working with my student liquid rocket club and building my own personal electronics projects.
I like being close to real hardware, testing things, figuring out what broke, and making the next version better.
The work I keep coming back to most is power electronics and PCB design.
Those are the areas I want to keep growing in professionally as I keep building more serious projects.